 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection of 3D Bounding Boxes of Vehicles Using Perspective Transformation for Accurate Speed Measurement
Paper and Code
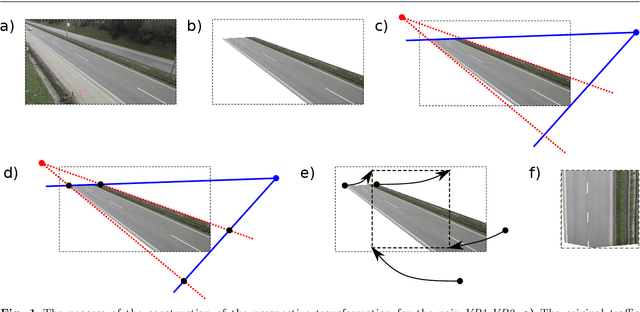

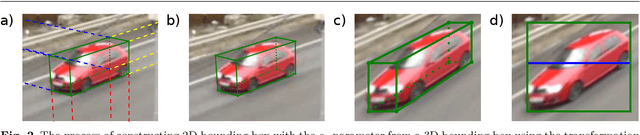
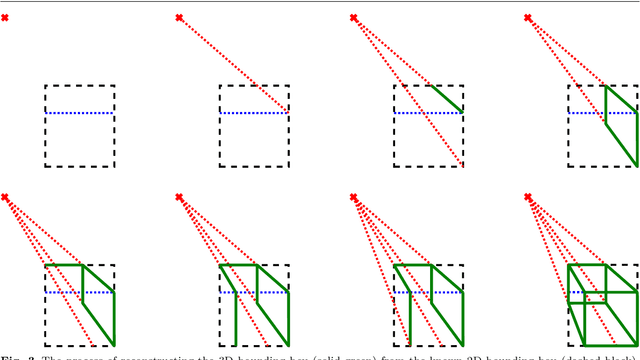
Detection and tracking of vehicles captured by traffic surveillance cameras is a key component of intelligent transportation systems. We present an improved version of our algorithm for detection of 3D bounding boxes of vehicles, their tracking and subsequent speed estimation. Our algorithm utilizes the known geometry of vanishing points in the surveilled scene to construct a perspective transformation. The transformation enables an intuitive simplification of the problem of detecting 3D bounding boxes to detection of 2D bounding boxes with one additional parameter using a standard 2D object detector. Main contribution of this paper is an improved construction of the perspective transformation which is more robust and fully automatic and an extended experimental evaluation of speed estimation. We test our algorithm on the speed estimation task of the BrnoCompSpeed dataset. We evaluate our approach with different configurations to gauge the relationship between accuracy and computational costs and benefits of 3D bounding box detection over 2D detection. All of the tested configurations run in real-time and are fully automatic. Compared to other published state-of-the-art fully automatic results our algorithm reduces the mean absolute speed measurement error by 32% (1.10 km/h to 0.75 km/h) and the absolute median error by 40% (0.97 km/h to 0.58 km/h).