 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Reward Function on Reinforcement Learning for Automated Driving
Paper and Code
Mar 20, 2025
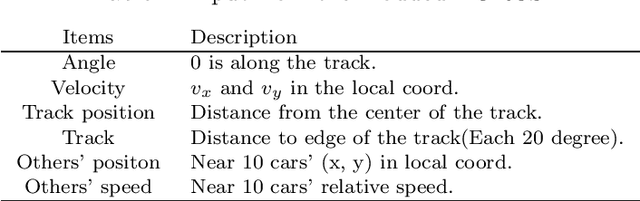


This paper proposes a design scheme of reward function that constantly evaluates both driving states and actions for applying reinforcement learning to automated driving. In the field of reinforcement learning, reward functions often evaluate whether the goal is achieved by assigning values such as +1 for success and -1 for failure. This type of reward function can potentially obtain a policy that achieves the goal, but the process by which the goal is reached is not evaluated. However, process to reach a destination is important for automated driving, such as keeping velocity, avoiding risk, retaining distance from other cars, keeping comfortable for passengers. Therefore, the reward function designed by the proposed scheme is suited for automated driving by evaluating driving process. The effects of the proposed scheme are demonstrated on simulated circuit driving and highway cruising. Asynchronous Advantage Actor-Critic is used, and models are trained under some situations for generalization. The result shows that appropriate driving positions are obtained, such as traveling on the inside of corners, and rapid deceleration to turn along sharp curves. In highway cruising, the ego vehicle becomes able to change lane in an environment where there are other vehicles with suitable deceleration to avoid catching up to a front vehicle, and acceleration so that a rear vehicle does not catch up to the ego vehicle.