 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an Autonomous Agriculture Robot for Real Time Weed Detection using CNN
Paper and Code
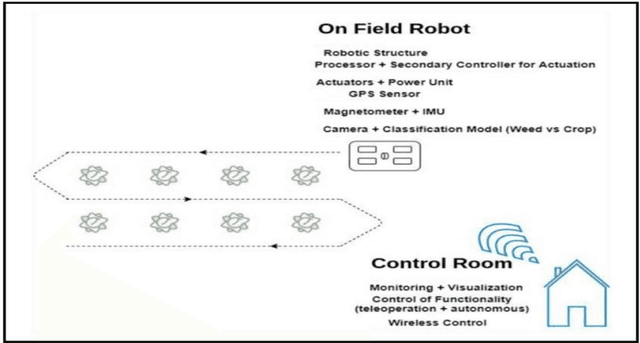
Agriculture has always remained an integral part of the world. As the human population keeps on rising, the demand for food also increases, and so is the dependency on the agriculture industry. But in today's scenario, because of low yield, less rainfall, etc., a dearth of manpower is created in this agricultural sector, and people are moving to live in the cities, and villages are becoming more and more urbanized. On the other hand, the field of robotics has seen tremendous development in the past few years. The concepts like Deep Learning (DL), Artificial Intelligence (AI), and Machine Learning (ML) are being incorporated with robotics to create autonomous systems for various sectors like automotive, agriculture, assembly line management, etc. Deploying such autonomous systems in the agricultural sector help in many aspects like reducing manpower, better yield, and nutritional quality of crops. So, in this paper, the system design of an autonomous agricultural robot which primarily focuses on weed detection is described. A modified deep-learning model for the purpose of weed detection is also proposed. The primary objective of this robot is the detection of weed on a real-time basis without any human involvement, but it can also be extended to design robots in various other applications involved in farming like weed removal, plowing, harvesting, etc., in turn making the farming industry more efficient. Source code and other details can be found at https://github.com/Dhruv2012/Autonomous-Farm-Robot