Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Hybrid Robot Control System using Memristor-Model and Ant-Inspired Based Information Transfer Protocols
Paper and Code
Feb 17, 2014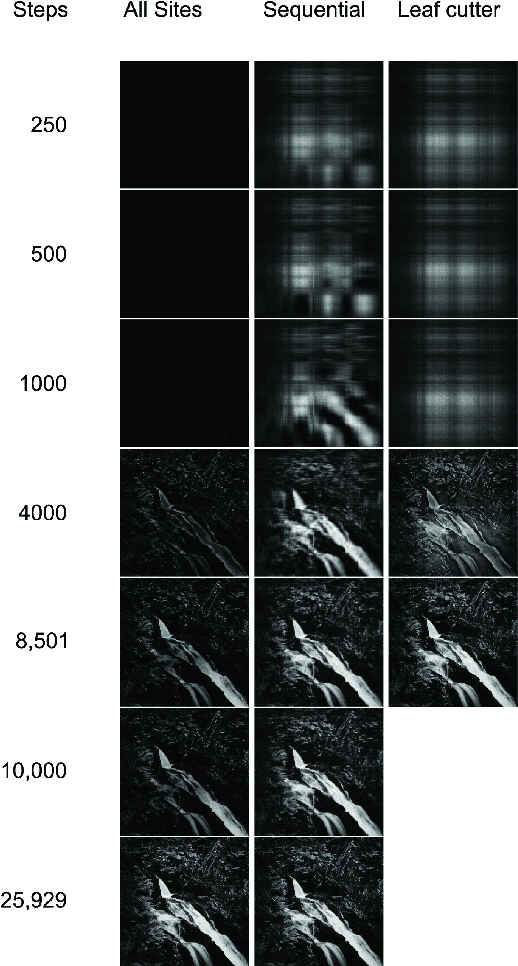
It is not always possible for a robot to process all the information from its sensors in a timely manner and thus quick and yet valid approximations of the robot's situation are needed. Here we design hybrid control for a robot within this limit using algorithms inspired by ant worker placement behaviour and based on memristor-based non-linearity.
* Workshop on Unconventional Approaches to Robotics, Automation and
Control (UARACIN), at International Conference on Robotics and Automation
(ICRA) 2013, Karlsruhe, Germany, Fr-Ws-09, pgs. 34-36 * Conference
View paper on