 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Experimental Validation of an Autonomous USV for Sensor Fusion-Based Navigation in GNSS-Denied Environments
Paper and Code
Mar 30, 2025
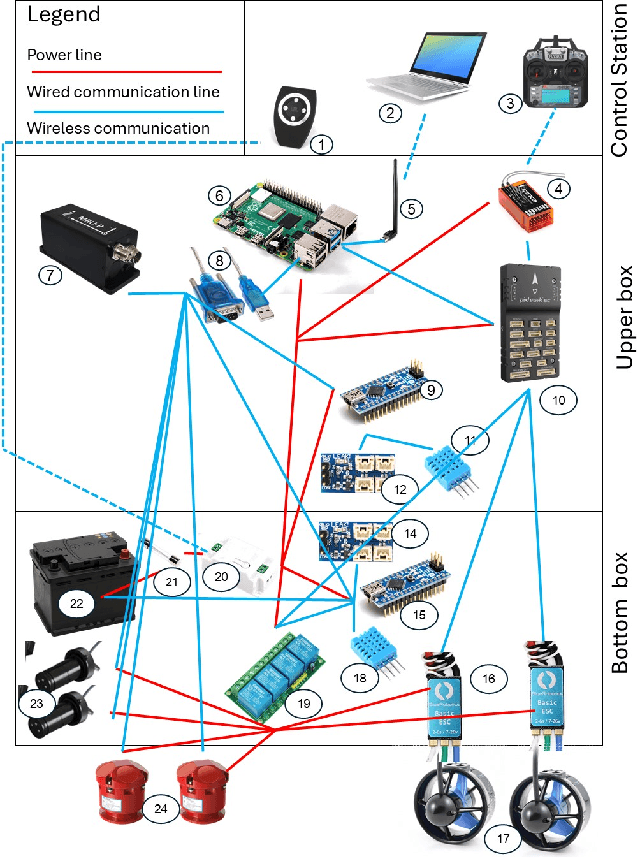
This paper presents the design, development, and experimental validation of MARVEL, an autonomous unmanned surface vehicle built for real-world testing of sensor fusion-based navigation algorithms in GNSS-denied environments. MARVEL was developed under strict constraints of cost-efficiency, portability, and seaworthiness, with the goal of creating a modular, accessible platform for high-frequency data acquisition and experimental learning. It integrates electromagnetic logs, Doppler velocity logs, inertial sensors, and real-time kinematic GNSS positioning. MARVEL enables real-time, in-situ validation of advanced navigation and AI-driven algorithms using redundant, synchronized sensors. Field experiments demonstrate the system's stability, maneuverability, and adaptability in challenging sea conditions. The platform offers a novel, scalable approach for researchers seeking affordable, open-ended tools to evaluate sensor fusion techniques under real-world maritime constraints.