 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Experimental Study of Vacuum Suction Grabbing Technology to Grasp Fabric Piece
Paper and Code
Aug 18, 2024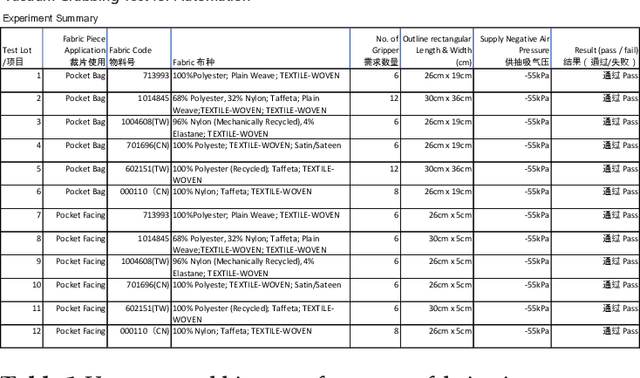

The primary objective of this study was to design the grabbing technique used to determine the vacuum suction gripper and its design parameters for the pocket welting operation in apparel manufacturing. It presents the application of vacuum suction in grabbing technology, a technique that has revolutionized the handling and manipulation to grasp the various fabric materials in a range of garment industries. Vacuum suction, being non-intrusive and non-invasive, offers several advantages compared to traditional grabbing methods. It is particularly useful in scenarios where soft woven fabric and air-impermeable fabric items need to be handled with utmost care. The paper delves into the working principles of vacuum suction, its various components, and the underlying physics involved. Furthermore, it explores the various applications of vacuum suction in the garment industry into the automation exploration. The paper also highlights the challenges and limitations of vacuum suction technology and suggests potential areas for further research and development.