 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of a Generic Visual SLAM Framework for Multi-Camera Systems
Paper and Code
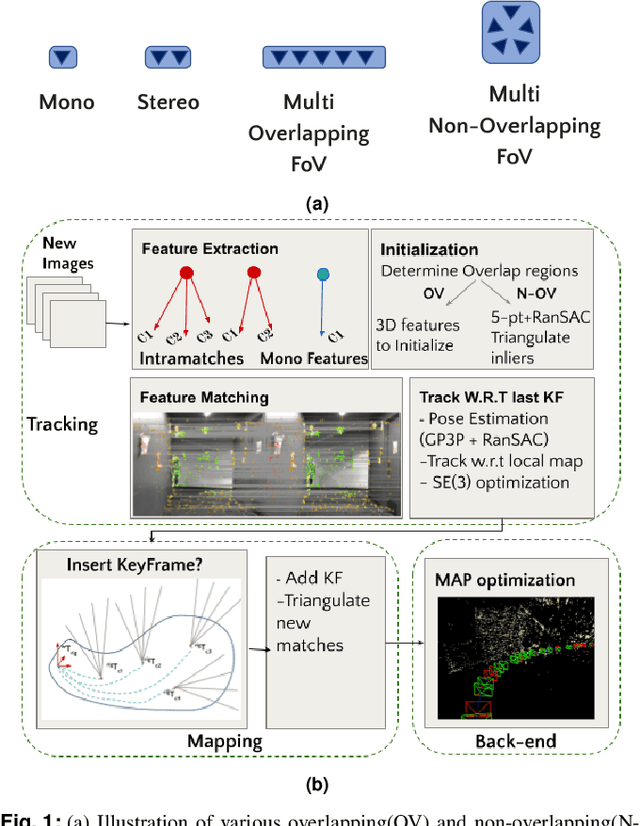
Multi-camera systems have been shown to improve the accuracy and robustness of SLAM estimates, yet state-of-the-art SLAM systems predominantly support monocular or stereo setups. This paper presents a generic sparse visual SLAM framework capable of running on any number of cameras and in any arrangement. Our SLAM system uses the generalized camera model, which allows us to represent an arbitrary multi-camera system as a single imaging device. Additionally, it takes advantage of the overlapping fields of view (FoV) by extracting cross-matched features across cameras in the rig. This limits the linear rise in the number of features with the number of cameras and keeps the computational load in check while enabling an accurate representation of the scene. We evaluate our method in terms of accuracy, robustness, and run time on indoor and outdoor datasets that include challenging real-world scenarios such as narrow corridors, featureless spaces, and dynamic objects. We show that our system can adapt to different camera configurations and allows real-time execution for typical robotic applications. Finally, we benchmark the impact of the critical design parameters - the number of cameras and the overlap between their FoV that define the camera configuration for SLAM. All our software and datasets are freely available for further research.