 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Variable Aerial Cable Towed System
Paper and Code
Jan 08, 2020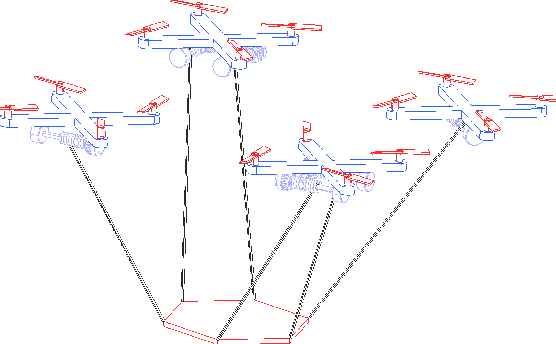
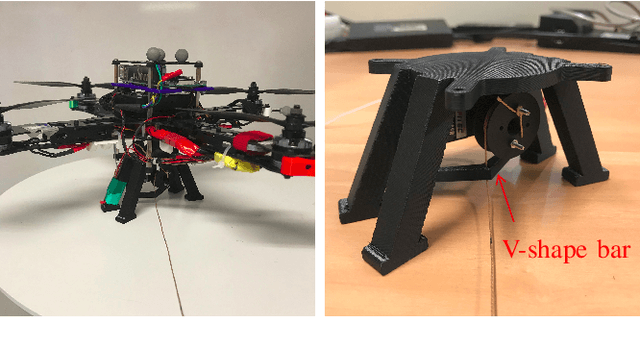
Aerial Cable Towed Systems (ACTS) are composed of several Unmanned Aerial Vehicles (UAVs) connected to a payload by cables. Compared to towing objects from individual aerial vehicles, an ACTS has significant advantages such as heavier payload capacity, modularity, and full control of the payload pose. They are however generally large with limited ability to meet geometric constraints while avoiding collisions between UAVs. This paper presents the modelling, performance analysis, design, and a proposed controller for a novel ACTS with variable cable lengths, named Variable Aerial Cable Towed System (VACTS).Winches are embedded on the UAVs for actuating the cable lengths similar to a Cable-Driven Parallel Robot to increase the versatility of the ACTS. The general geometric, kinematic and dynamic models of the VACTS are derived, followed by the development of a centralized feedback linearization controller. The design is based on a wrench analysis of the VACTS, without constraining the cables to pass through the UAV center of mass, as in current works. Additionally, the performance of the VACTS and ACTS are compared showing that the added versatility comes at the cost of payload and configuration flexibility. A prototype confirms the feasibility of the system.