 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Completion using Geometry-Aware Embedding
Paper and Code
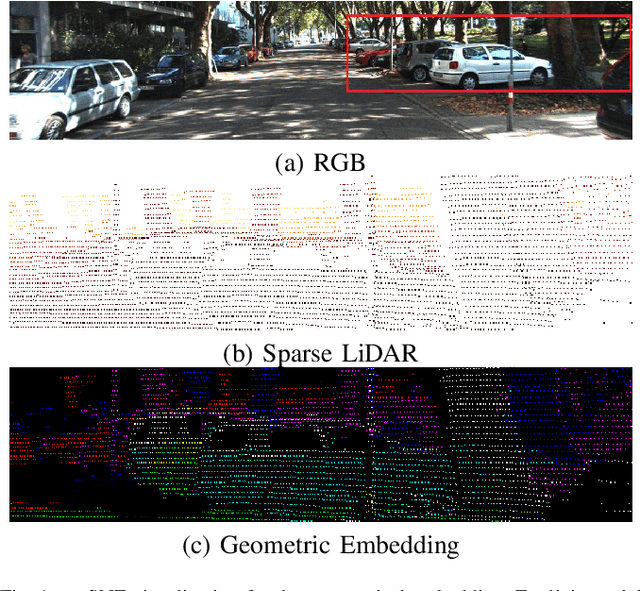

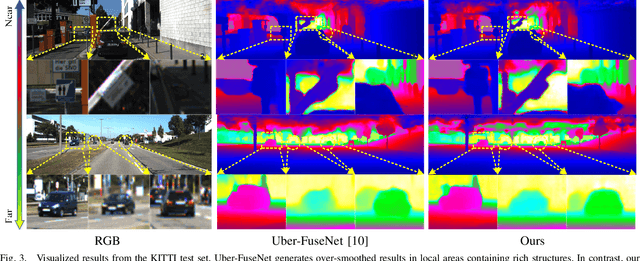
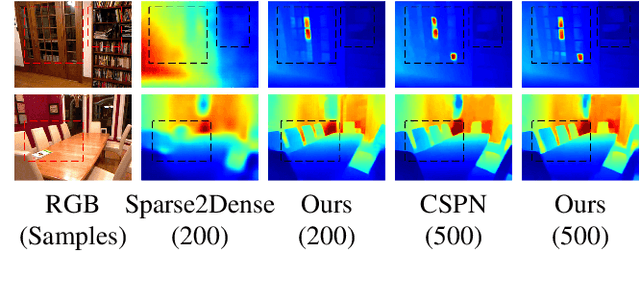
Exploiting internal spatial geometric constraints of sparse LiDARs is beneficial to depth completion, however, has been not explored well. This paper proposes an efficient method to learn geometry-aware embedding, which encodes the local and global geometric structure information from 3D points, e.g., scene layout, object's sizes and shapes, to guide dense depth estimation. Specifically, we utilize the dynamic graph representation to model generalized geometric relationship from irregular point clouds in a flexible and efficient manner. Further, we joint this embedding and corresponded RGB appearance information to infer missing depths of the scene with well structure-preserved details. The key to our method is to integrate implicit 3D geometric representation into a 2D learning architecture, which leads to a better trade-off between the performance and efficiency. Extensive experiments demonstrate that the proposed method outperforms previous works and could reconstruct fine depths with crisp boundaries in regions that are over-smoothed by them. The ablation study gives more insights into our method that could achieve significant gains with a simple design, while having better generalization capability and stability. The code is available at https://github.com/Wenchao-Du/GAENet.