 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Camera Based Particle Filter for Robotic Osteotomy Navigation
Paper and Code
Oct 24, 2019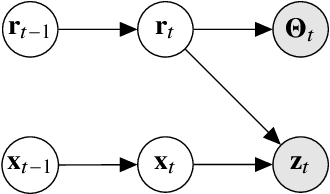
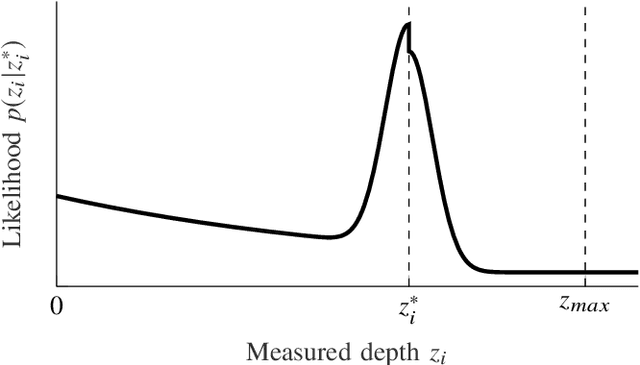
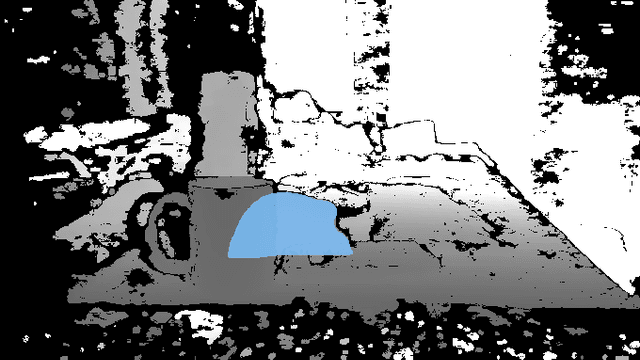
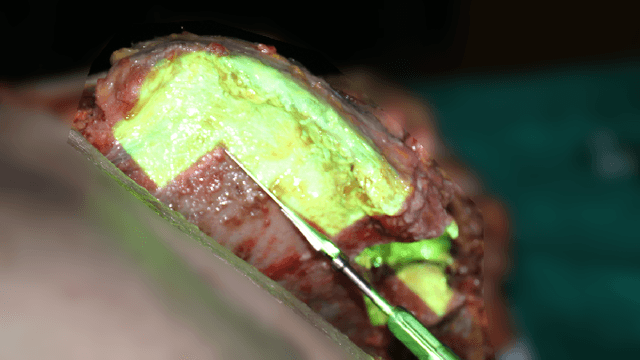
Active surgical robots lack acceptance in clinical practice, because they do not offer the flexibility and usability required for a versatile usage: the systems require a large installation space or a complicated registration step, where the preoperative plan is aligned to the patient and transformed to the base frame of the robot. In this paper, a navigation system for robotic osteotomies is designed, which uses the raw depth images from a camera mounted on the flange of a lightweight robot arm. Consequently, the system does not require any rigid attachment of the robot or fiducials to the bone and the time-consuming registration step is eliminated. Instead, only a coarse initialization is required which improves the usability in surgery. The full six dimensional pose of the iliac crest bone is estimated with a particle filter at a maximum rate of 90 Hz. The presented method is robust against changing lighting conditions, blood or tissue on the bone surface and partial occlusions caused by the surgeons. Proof of the usability in a clinical environment is successfully provided in a corpse study, where surgeons used an augmented reality osteotomy template, which was aligned to bone via the particle filters pose estimates for the resection of transplants from the iliac crest.