 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepLO: Geometry-Aware Deep LiDAR Odometry
Paper and Code
Feb 27, 2019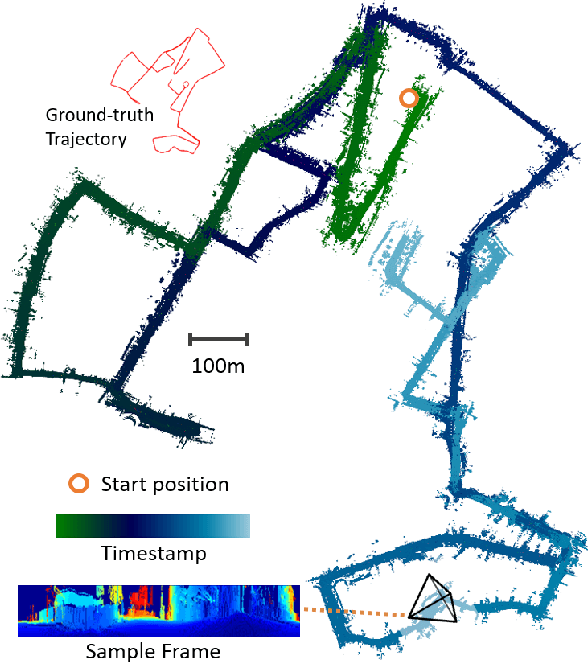
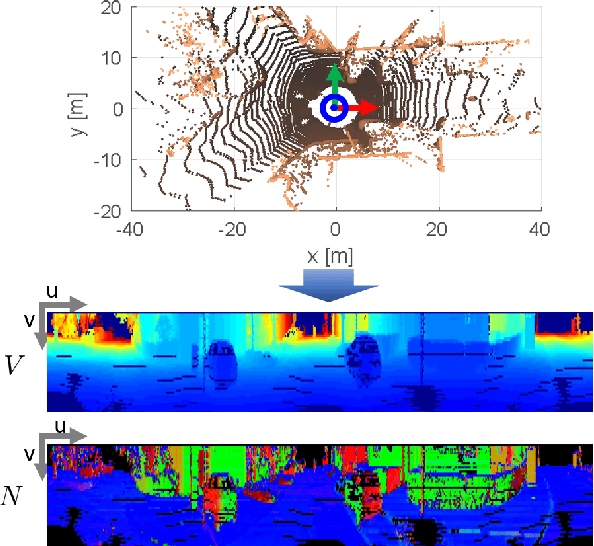

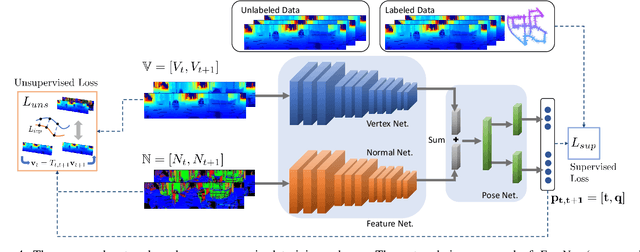
Recently, learning-based ego-motion estimation approaches have drawn strong interest from studies mostly focusing on visual perception. These groundbreaking works focus on unsupervised learning for odometry estimation but mostly for visual sensors. Compared to images, a learning-based approach using Light Detection and Ranging (LiDAR) has been reported in a few studies where, most often, a supervised learning framework is proposed. In this paper, we propose a novel approach to geometry-aware deep LiDAR odometry trainable via both supervised and unsupervised frameworks. We incorporate the Iterated Closest Point (ICP) algorithm into a deep-learning framework and show the reliability of the proposed pipeline. We provide two loss functions that allow switching between supervised and unsupervised learning depending on the ground-truth validity in the training phase. An evaluation using the KITTI and Oxford RobotCar dataset demonstrates the prominent performance and efficiency of the proposed method when achieving pose accuracy.