 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Paper and Code
May 25, 2024
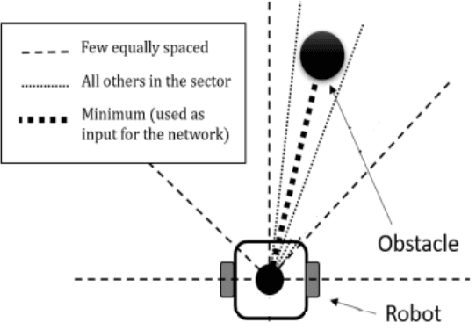


Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.