 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for Localization in the Lung
Paper and Code
Mar 25, 2019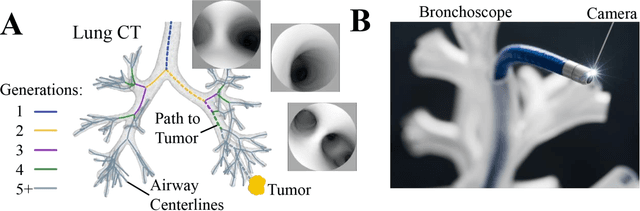
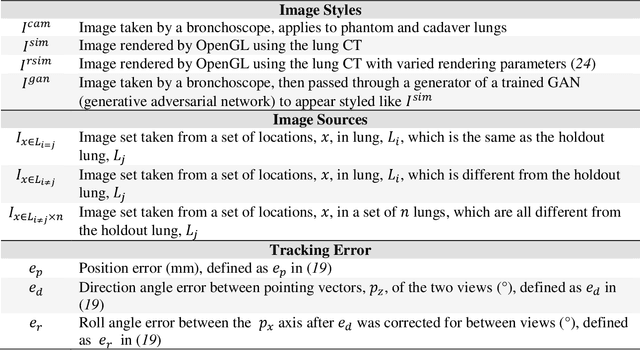
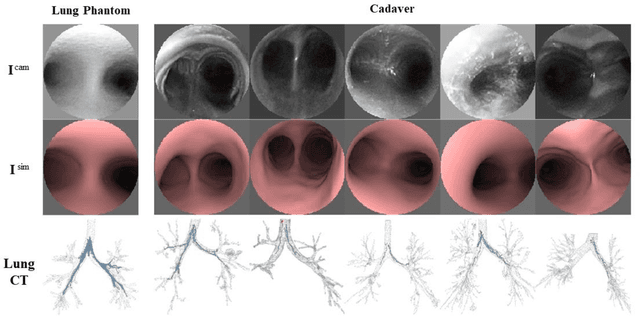
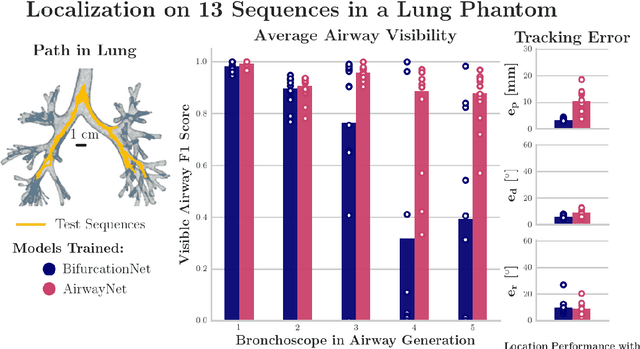
Lung cancer is the leading cause of cancer-related death worldwide, and early diagnosis is critical to improving patient outcomes. To diagnose cancer, a highly trained pulmonologist must navigate a flexible bronchoscope deep into the branched structure of the lung for biopsy. The biopsy fails to sample the target tissue in 26-33% of cases largely because of poor registration with the preoperative CT map. We developed two deep learning approaches to localize the bronchoscope in the preoperative CT map in real time and tested the algorithms across 13 trajectories in a lung phantom and 68 trajectories in 11 human cadaver lungs. In the lung phantom, we observe performance reaching 95% precision and recall of visible airways and 3 mm average position error. On a successful cadaver lung sequence, the algorithms trained on simulation alone achieved 77%-94% precision and recall of visible airways and 4-6 mm average position error. We also compare the effect of GAN-stylizing images and we look at aggregate statistics over the entire set of trajectories.