 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-learning-based classification and retrieval of components of a process plant from segmented point clouds
Paper and Code
Dec 13, 2019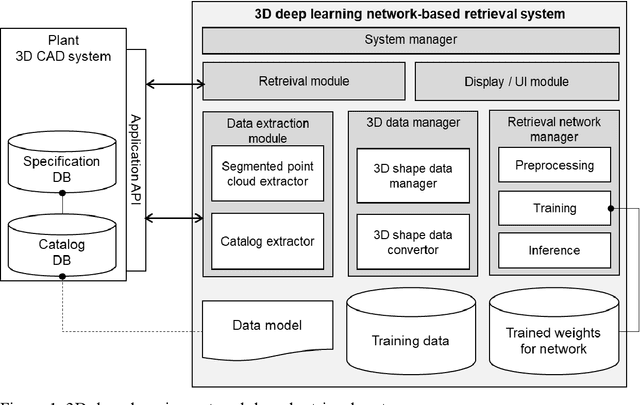
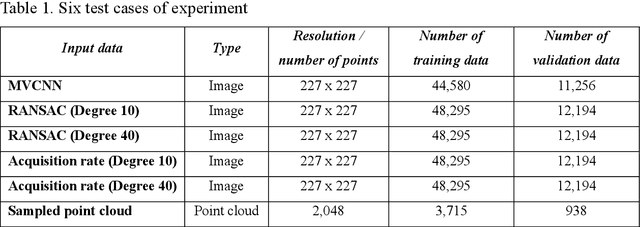
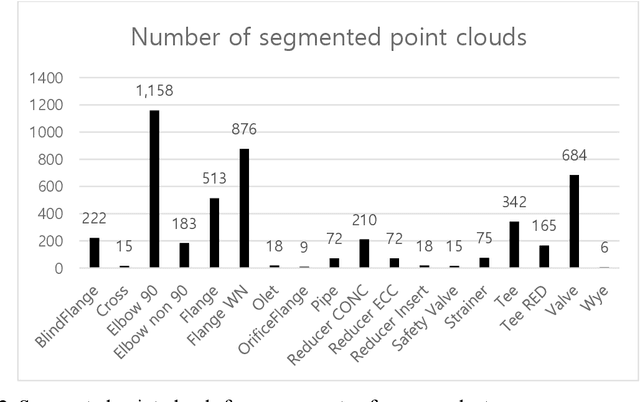

Technology to recognize the type of component represented by a point cloud is required in the reconstruction process of an as-built model of a process plant based on laser scanning. The reconstruction process of a process plant through laser scanning is divided into point cloud registration, point cloud segmentation, and component type recognition and placement. Loss of shape data or imbalance of point cloud density problems generally occur in the point cloud data collected from large-scale facilities. In this study, we experimented with the possibility of applying object recognition technology based on 3D deep learning networks, which have been showing high performance recently, and analyzed the results. For training data, we used a segmented point cloud repository about components that we constructed by scanning a process plant. For networks, we selected the multi-view convolutional neural network (MVCNN), which is a view-based method, and PointNet, which is designed to allow the direct input of point cloud data. In the case of the MVCNN, we also performed an experiment on the generation method for two types of multi-view images that can complement the shape occlusion of the segmented point cloud. In this experiment, the MVCNN showed the highest retrieval accuracy of approximately 87%, whereas PointNet showed the highest retrieval mean average precision of approximately 84%. Furthermore, both networks showed high recognition performance for the segmented point cloud of plant components when there was sufficient training data.