 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Theoretic Planning with Concurrent Temporally Extended Actions
Paper and Code
Jan 10, 2013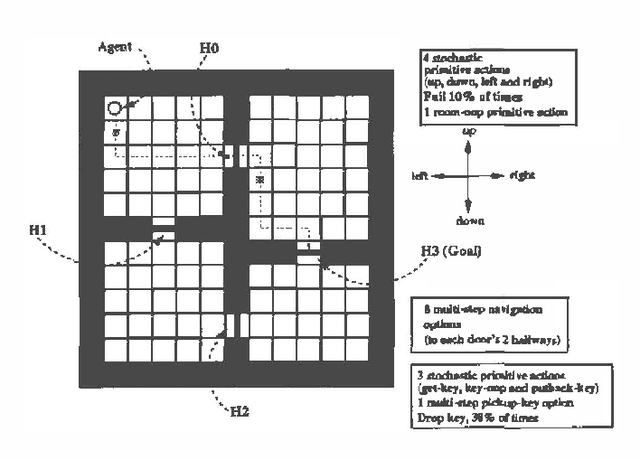
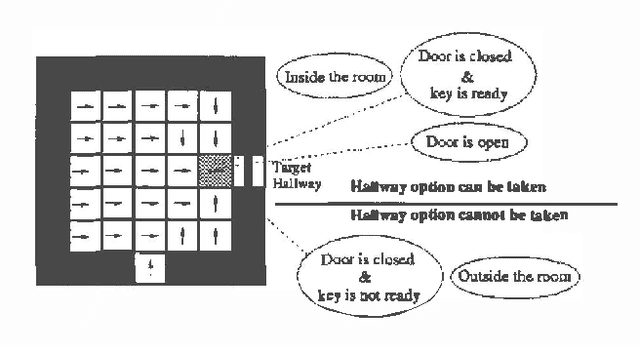
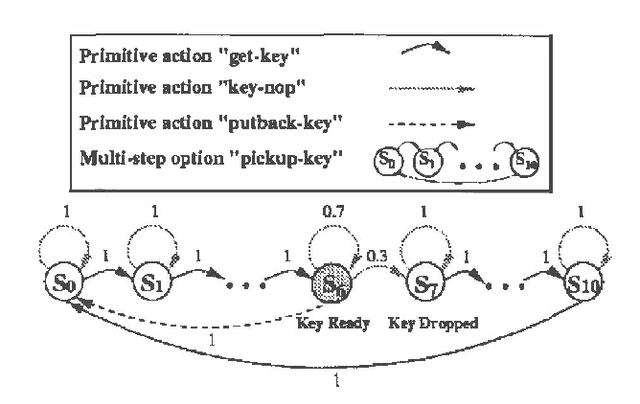
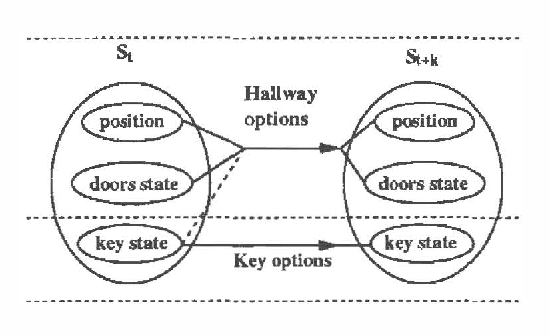
We investigate a model for planning under uncertainty with temporallyextended actions, where multiple actions can be taken concurrently at each decision epoch. Our model is based on the options framework, and combines it with factored state space models,where the set of options can be partitioned into classes that affectdisjoint state variables. We show that the set of decisionepochs for concurrent options defines a semi-Markov decisionprocess, if the underlying temporally extended actions being parallelized arerestricted to Markov options. This property allows us to use SMDPalgorithms for computing the value function over concurrentoptions. The concurrent options model allows overlapping execution ofoptions in order to achieve higher performance or in order to performa complex task. We describe a simple experiment using a navigationtask which illustrates how concurrent options results in a faster planwhen compared to the case when only one option is taken at a time.