 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralised Approach for Multi Agent Path Finding
Paper and Code
Jun 03, 2021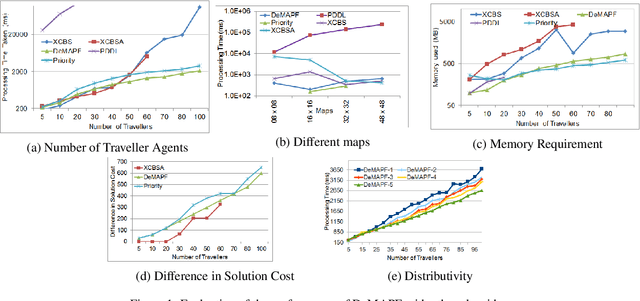
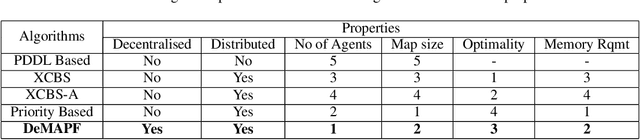
Multi Agent Path Finding (MAPF) requires identification of conflict free paths for agents which could be point-sized or with dimensions. In this paper, we propose an approach for MAPF for spatially-extended agents. These find application in real world problems like Convoy Movement Problem, Train Scheduling etc. Our proposed approach, Decentralised Multi Agent Path Finding (DeMAPF), handles MAPF as a sequence of pathplanning and allocation problems which are solved by two sets of agents Travellers and Routers respectively, over multiple iterations. The approach being decentralised allows an agent to solve the problem pertinent to itself, without being aware of other agents in the same set. This allows the agents to be executed on independent machines, thereby leading to scalability to handle large sized problems. We prove, by comparison with other distributed approaches, that the approach leads to a faster convergence to a conflict-free solution, which may be suboptimal, with lesser memory requirement.