 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Robust Control Using Reinforcement Learning
Paper and Code
Apr 16, 2020


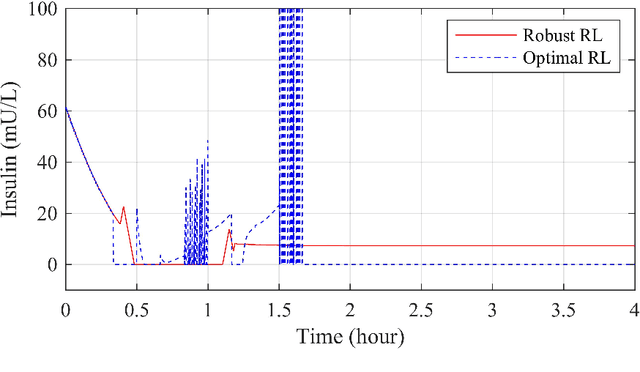
This paper proposes a robust control design method using reinforcement-learning for controlling partially-unknown dynamical systems under uncertain conditions. The method extends the optimal reinforcement-learning algorithm with a new learning technique that is based on the robust control theory. By learning from the data, the algorithm proposed actions that guarantees the stability of the closed loop system within the uncertainties estimated from the data. Control policies are calculated by solving a set of linear matrix inequalities. The controller was evaluated using simulations on a blood glucose model for patients with type-1 diabetes. Simulation results show that the proposed methodology is capable of safely regulates the blood glucose within a healthy level under the influence of measurement and process noises. The controller has also significantly reduced the post-meal fluctuation of the blood glucose. A comparison between the proposed algorithm and the existing optimal reinforcement learning algorithm shows the improved robustness of the closed loop system using our method.