 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDANAE: a denoising autoencoder for underwater attitude estimation
Paper and Code
Nov 13, 2020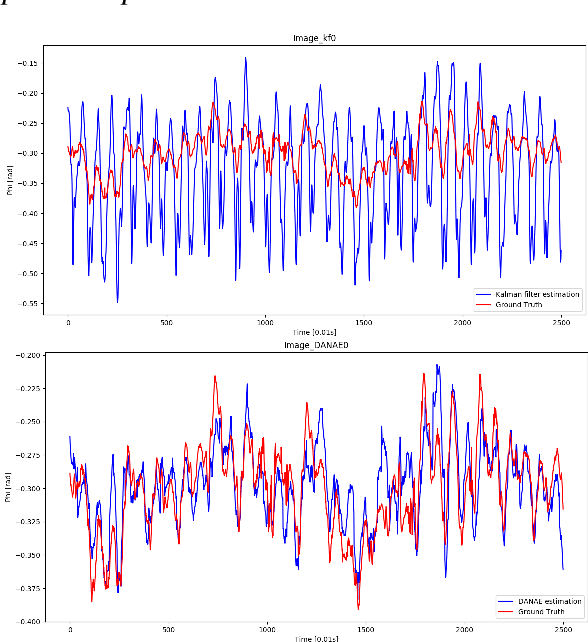
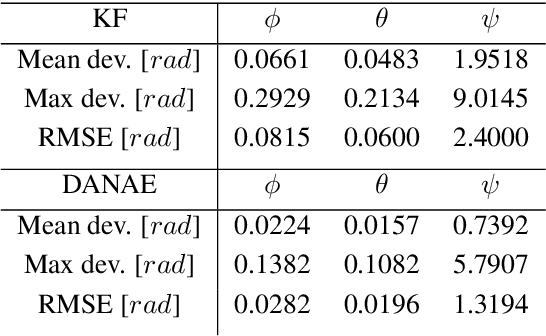

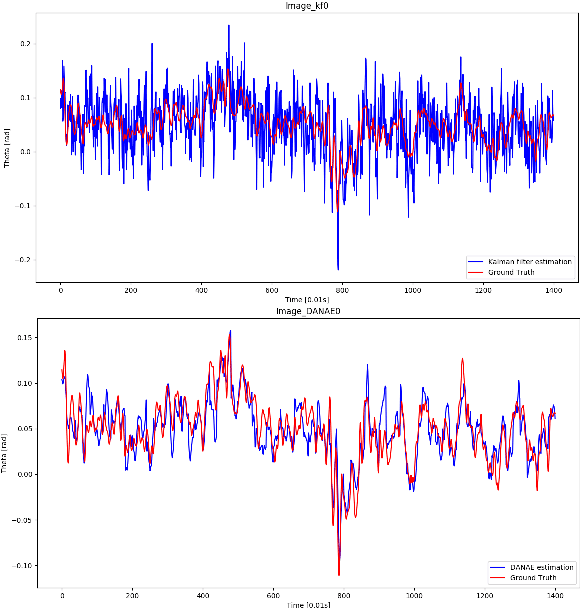
One of the main issues for underwater robots navigation is their accurate positioning, which heavily depends on the orientation estimation phase. The systems employed to this scope are affected by different noise typologies, mainly related to the sensors and to the irregular noise of the underwater environment. Filtering algorithms can reduce their effect if opportunely configured, but this process usually requires fine techniques and time. In this paper we propose DANAE, a deep Denoising AutoeNcoder for Attitude Estimation which works on Kalman filter IMU/AHRS data integration with the aim of reducing any kind of noise, independently of its nature. This deep learning-based architecture showed to be robust and reliable, significantly improving the Kalman filter results. Further tests could make this method suitable for real-time applications on navigation tasks.