 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycloidal Trajectory Realization on Staircase with Optimal Trajectory Tracking Control based on Neural Network Temporal Quantized Lagrange Dynamics (NNTQLD)
Paper and Code
Dec 02, 2020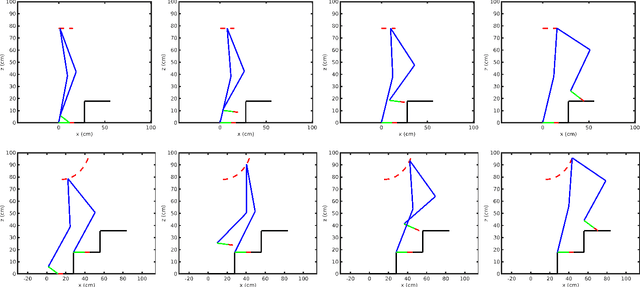
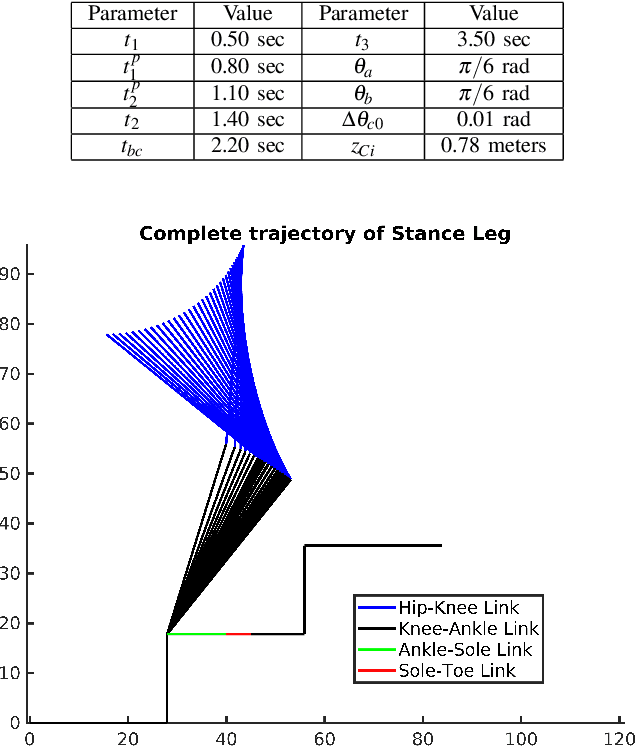
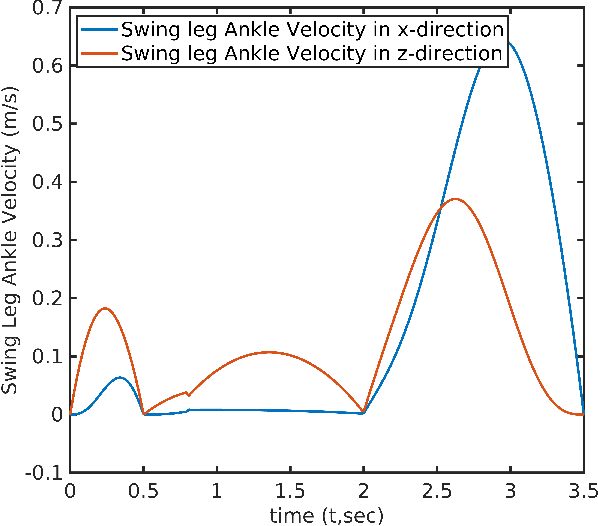
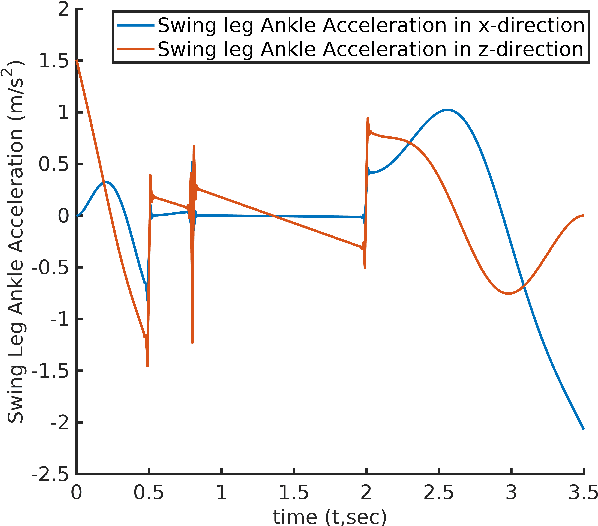
In this paper, a novel optimal technique for joint angles trajectory tracking control of a biped robot with toe foot is proposed. For the task of climbing stairs by a 9 link biped model, a cycloid trajectory for swing phase is proposed in such a way that the cycloid variables depend on the staircase dimensions. Zero Moment Point(ZMP) criteria is taken for satisfying stability constraint. This paper mainly can be divided into 4 steps: 1) Planning stable cycloid trajectory for initial step and subsequent step for climbing upstairs. 2) Inverse Kinematics using unsupervised artificial neural network with knot shifting procedure for jerk minimization. 3) Modeling Dynamics for Toe foot biped model using Lagrange Dynamics along with contact modeling using spring damper system , and finally 4) Real time joint angle trajectory tracking optimization using Temporal Quantized Lagrange Dynamics which takes inverse kinematics output from neural network as its inputs. Generated patterns have been simulated in MATLAB.