Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounterfactual equivalence for POMDPs, and underlying deterministic environments
Paper and Code
Jan 14, 2018
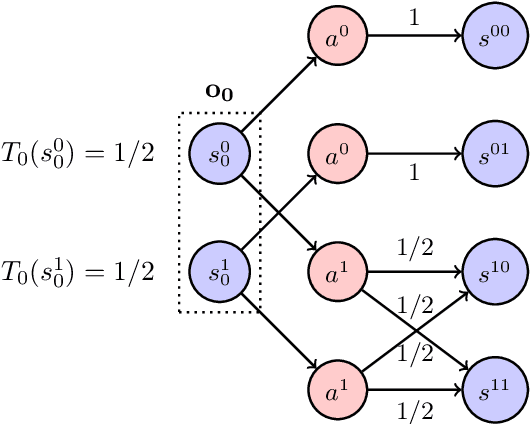
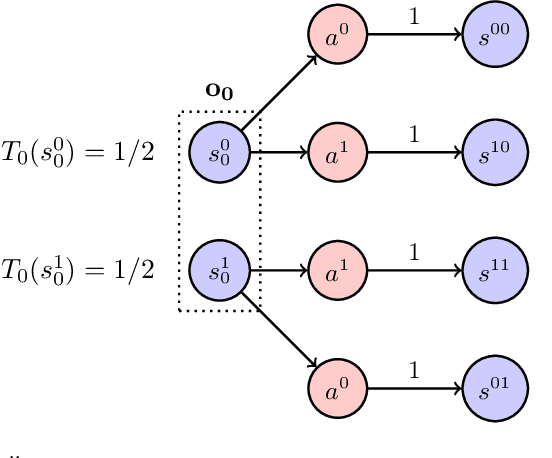

Partially Observable Markov Decision Processes (POMDPs) are rich environments often used in machine learning. But the issue of information and causal structures in POMDPs has been relatively little studied. This paper presents the concepts of equivalent and counterfactually equivalent POMDPs, where agents cannot distinguish which environment they are in though any observations and actions. It shows that any POMDP is counterfactually equivalent, for any finite number of turns, to a deterministic POMDP with all uncertainty concentrated into the initial state. This allows a better understanding of POMDP uncertainty, information, and learning.
View paper on