 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Saliency-based Obstacle Detection and AR Rendering for Increased Situational Awareness
Paper and Code
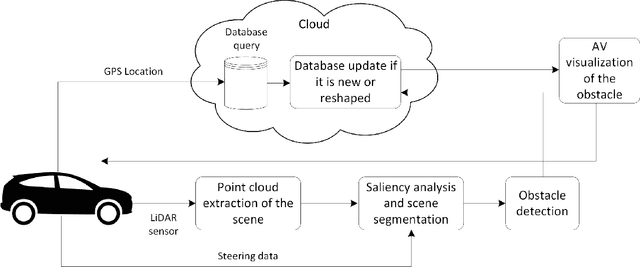
Autonomous vehicles are expected to operate safely in real-life road conditions in the next years. Nevertheless, unanticipated events such as the existence of unexpected objects in the range of the road, can put safety at risk. The advancement of sensing and communication technologies and Internet of Things may facilitate the recognition of hazardous situations and information exchange in a cooperative driving scheme, providing new opportunities for the increase of collaborative situational awareness. Safe and unobtrusive visualization of the obtained information may nowadays be enabled through the adoption of novel Augmented Reality (AR) interfaces in the form of windshields. Motivated by these technological opportunities, we propose in this work a saliency-based distributed, cooperative obstacle detection and rendering scheme for increasing the driver's situational awareness through (i) automated obstacle detection, (ii) AR visualization and (iii) information sharing (upcoming potential dangers) with other connected vehicles or road infrastructure. An extensive evaluation study using a variety of real datasets for pothole detection showed that the proposed method provides favorable results and features compared to other recent and relevant approaches.