 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlling an Autonomous Vehicle with Deep Reinforcement Learning
Paper and Code
Sep 24, 2019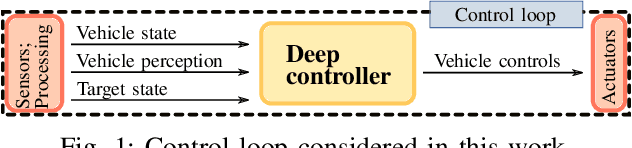
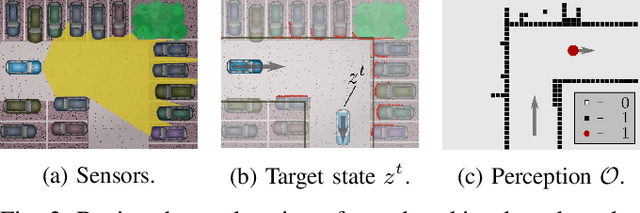
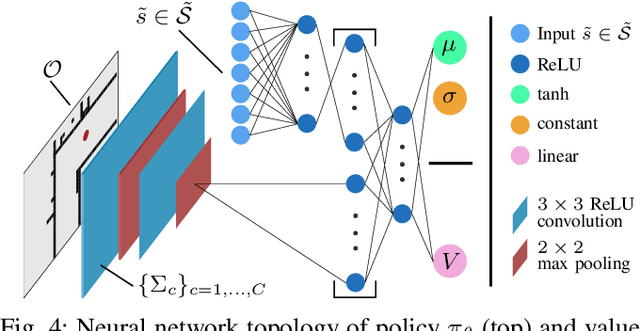
We present a control approach for autonomous vehicles based on deep reinforcement learning. A neural network agent is trained to map its estimated state to acceleration and steering commands given the objective of reaching a specific target state while considering detected obstacles. Learning is performed using state-of-the-art proximal policy optimization in combination with a simulated environment. Training from scratch takes five to nine hours. The resulting agent is evaluated within simulation and subsequently applied to control a full-size research vehicle. For this, the autonomous exploration of a parking lot is considered, including turning maneuvers and obstacle avoidance. Altogether, this work is among the first examples to successfully apply deep reinforcement learning to a real vehicle.