 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Of Mobile Robots Using Barrier Functions Under Temporal Logic Specifications
Paper and Code
Aug 14, 2019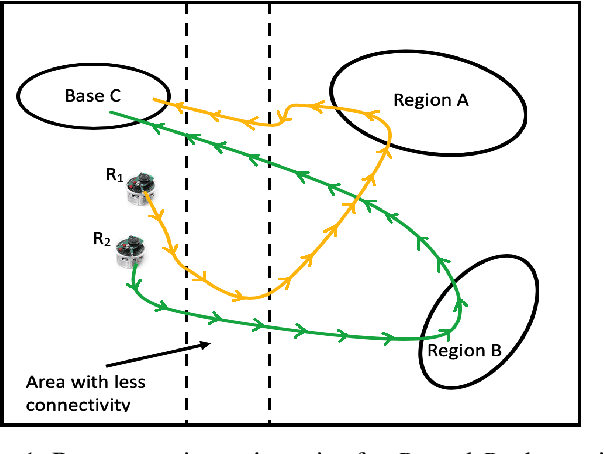
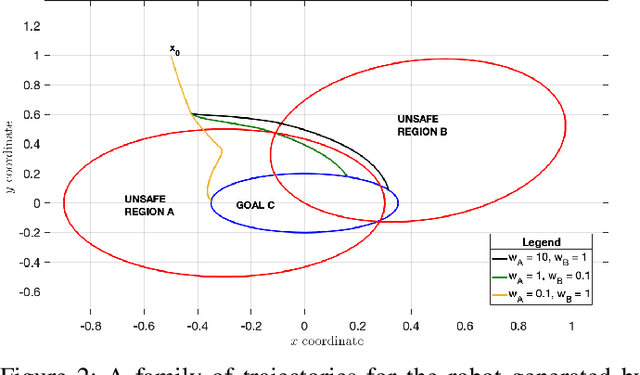


In this paper, we propose a framework for the control of mobile robots subject to temporal logic specifications using barrier functions. Complex task specifications can be conveniently encoded using linear temporal logic (LTL). In particular, we consider a fragment of LTL which encompasses a large class of motion planning specifications for a robotic system. Control barrier functions (CBFs) have recently emerged as a convenient tool to guarantee reachability and safety for a system. In addition, they can be encoded as affine constraints in a quadratic program (QP). In the case of complex system specifications, we show that following QP based methods in existing literature can lead to infeasibility and hence we provide a method of composition of multiple barrier functions in order to mitigate infeasibility. A scheme to prioritize different barrier functions which allows the user to encode the notion of priority based control, is also introduced. We prove that the resulting system trajectory synthesized by the proposed controller satisfies the given specification. Robotic simulation and experimental results are provided in addition to the theoretical framework.