 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Control for Automated Lane Change Behavior Based on Deep Deterministic Policy Gradient Algorithm
Paper and Code
Jun 05, 2019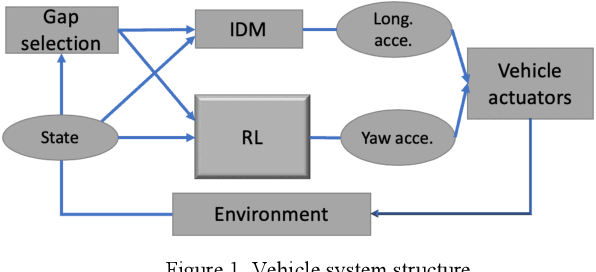
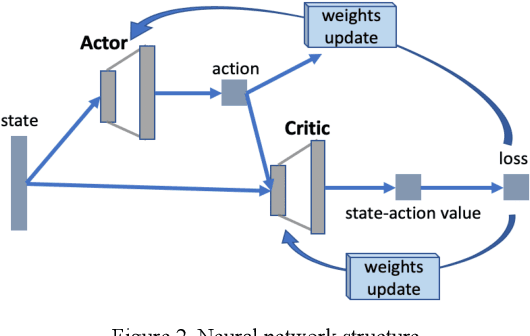
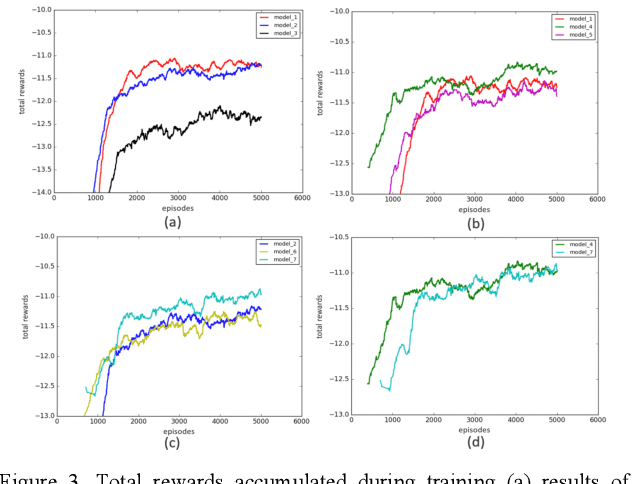
Lane change is a challenging task which requires delicate actions to ensure safety and comfort. Some recent studies have attempted to solve the lane-change control problem with Reinforcement Learning (RL), yet the action is confined to discrete action space. To overcome this limitation, we formulate the lane change behavior with continuous action in a model-free dynamic driving environment based on Deep Deterministic Policy Gradient (DDPG). The reward function, which is critical for learning the optimal policy, is defined by control values, position deviation status, and maneuvering time to provide the RL agent informative signals. The RL agent is trained from scratch without resorting to any prior knowledge of the environment and vehicle dynamics since they are not easy to obtain. Seven models under different hyperparameter settings are compared. A video showing the learning progress of the driving behavior is available. It demonstrates the RL vehicle agent initially runs out of road boundary frequently, but eventually has managed to smoothly and stably change to the target lane with a success rate of 100% under diverse driving situations in simulation.