Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Learning of Predictive Models in Video Sequences via Variational Autoencoders
Paper and Code
Jun 02, 2020

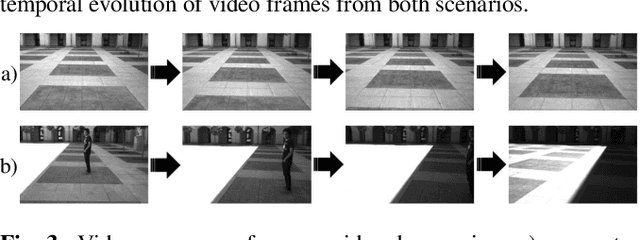

This paper proposes a method for performing continual learning of predictive models that facilitate the inference of future frames in video sequences. For a first given experience, an initial Variational Autoencoder, together with a set of fully connected neural networks are utilized to respectively learn the appearance of video frames and their dynamics at the latent space level. By employing an adapted Markov Jump Particle Filter, the proposed method recognizes new situations and integrates them as predictive models avoiding catastrophic forgetting of previously learned tasks. For evaluating the proposed method, this article uses video sequences from a vehicle that performs different tasks in a controlled environment.
* Manuscript accepted at the 27th IEEE International Conference on
Image Processing (ICIP 2020)
View paper on