 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConservative collision prediction and avoidance for stochastic trajectories in continuous time and space
Paper and Code
May 12, 2014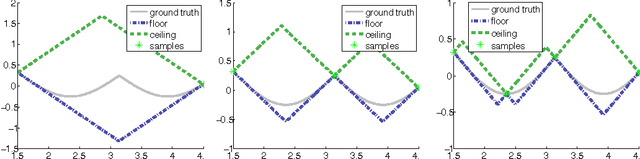

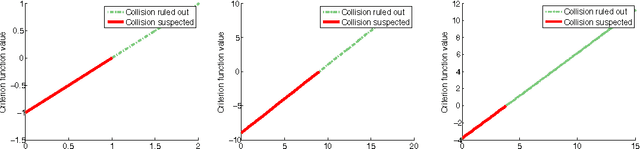
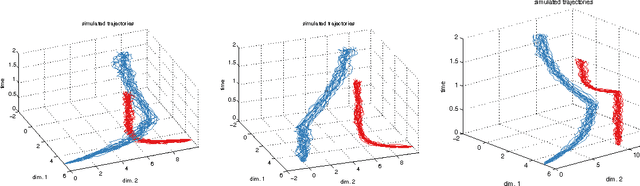
Existing work in multi-agent collision prediction and avoidance typically assumes discrete-time trajectories with Gaussian uncertainty or that are completely deterministic. We propose an approach that allows detection of collisions even between continuous, stochastic trajectories with the only restriction that means and variances can be computed. To this end, we employ probabilistic bounds to derive criterion functions whose negative sign provably is indicative of probable collisions. For criterion functions that are Lipschitz, an algorithm is provided to rapidly find negative values or prove their absence. We propose an iterative policy-search approach that avoids prior discretisations and yields collision-free trajectories with adjustably high certainty. We test our method with both fixed-priority and auction-based protocols for coordinating the iterative planning process. Results are provided in collision-avoidance simulations of feedback controlled plants.