 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Prediction Intervals for Markov Decision Process Trajectories
Paper and Code
Jun 21, 2022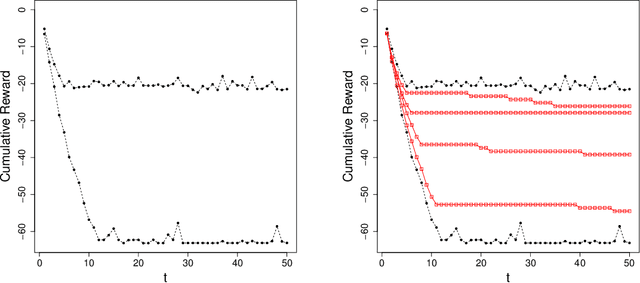
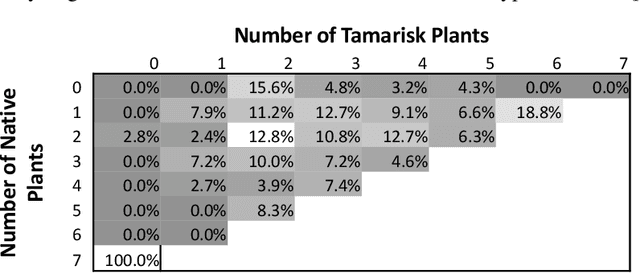
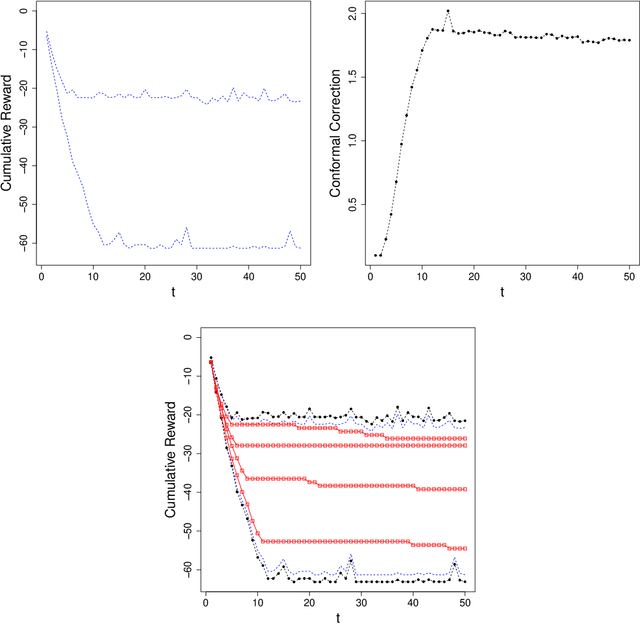
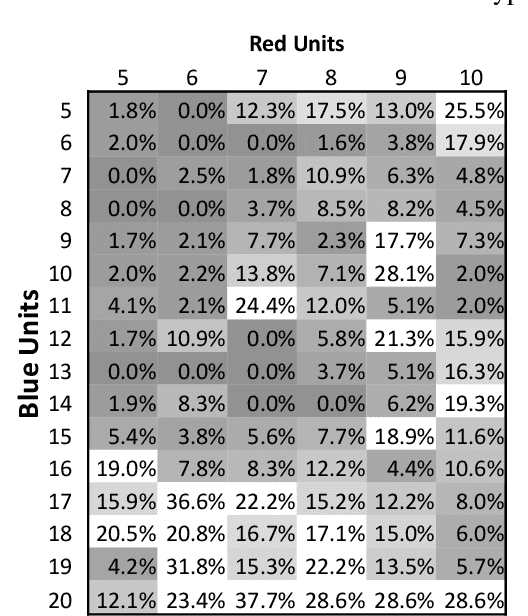
Before delegating a task to an autonomous system, a human operator may want a guarantee about the behavior of the system. This paper extends previous work on conformal prediction for functional data and conformalized quantile regression to provide conformal prediction intervals over the future behavior of an autonomous system executing a fixed control policy on a Markov Decision Process (MDP). The prediction intervals are constructed by applying conformal corrections to prediction intervals computed by quantile regression. The resulting intervals guarantee that with probability $1-\delta$ the observed trajectory will lie inside the prediction interval, where the probability is computed with respect to the starting state distribution and the stochasticity of the MDP. The method is illustrated on MDPs for invasive species management and StarCraft2 battles.