Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing the Newton-step faster than Hessian accumulation
Paper and Code
Aug 02, 2021

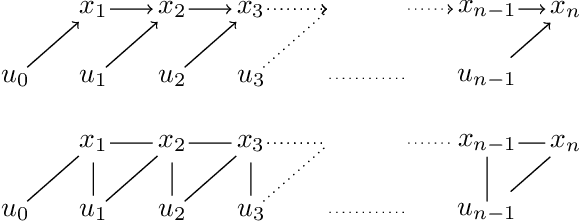
Computing the Newton-step of a generic function with $N$ decision variables takes $O(N^3)$ flops. In this paper, we show that given the computational graph of the function, this bound can be reduced to $O(m\tau^3)$, where $\tau, m$ are the width and size of a tree-decomposition of the graph. The proposed algorithm generalizes nonlinear optimal-control methods based on LQR to general optimization problems and provides non-trivial gains in iteration-complexity even in cases where the Hessian is dense.
* Presented at the Beyond First-order Methods workshop, ICML '21
View paper on