 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputational Flight Control: A Domain-Knowledge-Aided Deep Reinforcement Learning Approach
Paper and Code
Aug 19, 2019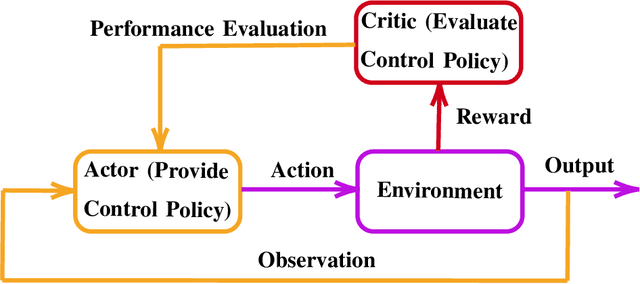
This papers aims to examine the potential of using the emerging deep reinforcement learning techniques in flight control. Instead of learning from scratch, the autopilot structure is fixed as typical three-loop autopilot and deep reinforcement learning is utilised to learn the autopilot gains. This domain-knowledge-aided approach is proved to significantly improve the learning efficiency. To solve the flight control problem, we then formulate a Markovian decision process with a proper reward function that enable the application of reinforcement learning theory. The state-of-the-art deep deterministic policy gradient algorithm is utilised to learn an action policy that maps the observed states to the autopilot gains. Extensive empirical numerical simulations are performed to validate the proposed computational control algorithm.