 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressive Sensing via Low-Rank Gaussian Mixture Models
Paper and Code
Aug 27, 2015

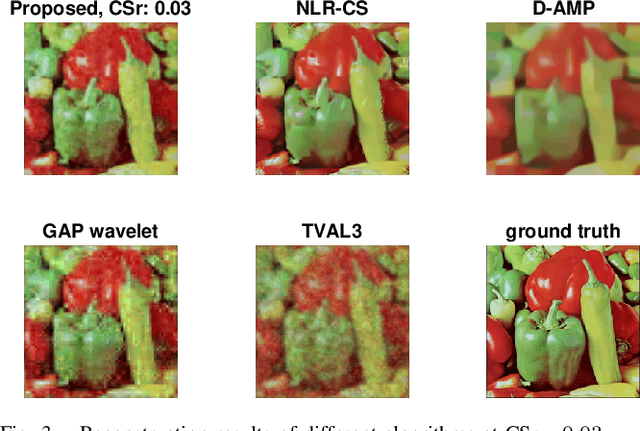
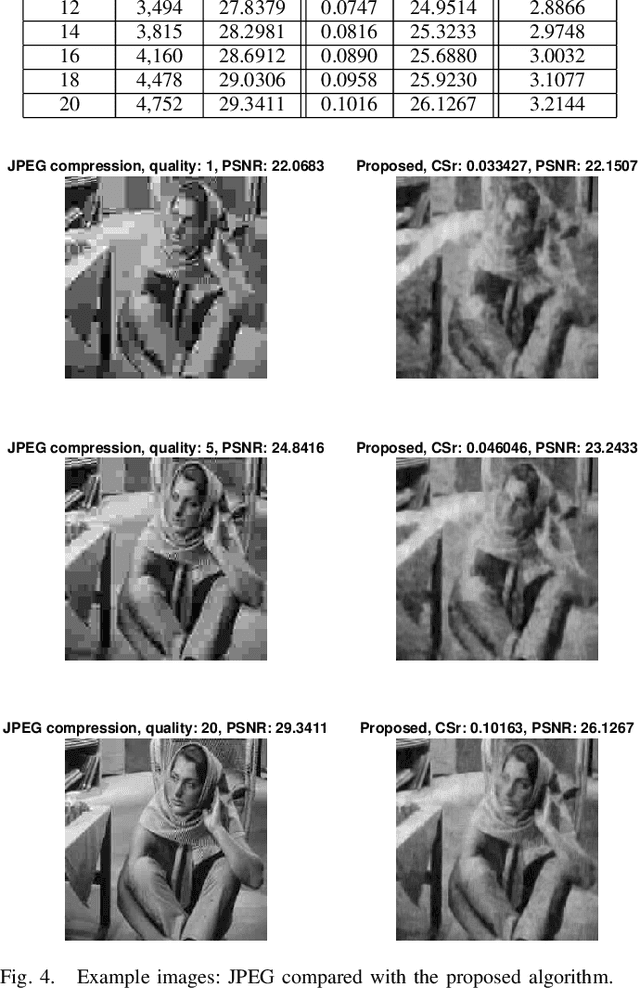
We develop a new compressive sensing (CS) inversion algorithm by utilizing the Gaussian mixture model (GMM). While the compressive sensing is performed globally on the entire image as implemented in our lensless camera, a low-rank GMM is imposed on the local image patches. This low-rank GMM is derived via eigenvalue thresholding of the GMM trained on the projection of the measurement data, thus learned {\em in situ}. The GMM and the projection of the measurement data are updated iteratively during the reconstruction. Our GMM algorithm degrades to the piecewise linear estimator (PLE) if each patch is represented by a single Gaussian model. Inspired by this, a low-rank PLE algorithm is also developed for CS inversion, constituting an additional contribution of this paper. Extensive results on both simulation data and real data captured by the lensless camera demonstrate the efficacy of the proposed algorithm. Furthermore, we compare the CS reconstruction results using our algorithm with the JPEG compression. Simulation results demonstrate that when limited bandwidth is available (a small number of measurements), our algorithm can achieve comparable results as JPEG.