 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
Paper and Code

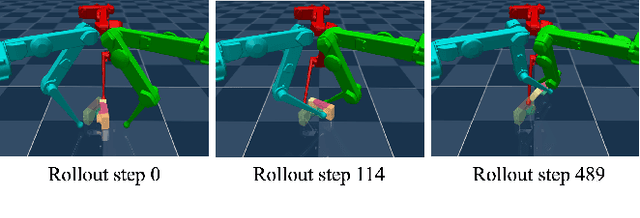
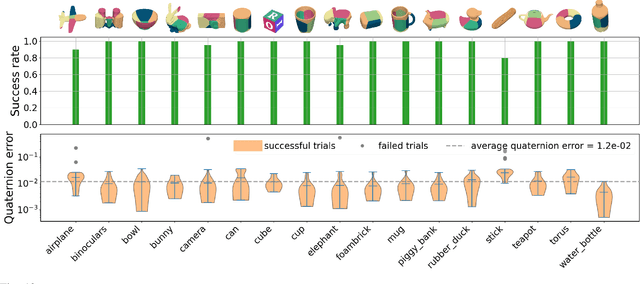

A significant barrier preventing model-based methods from matching the high performance of reinforcement learning in dexterous manipulation is the inherent complexity of multi-contact dynamics. Traditionally formulated using complementarity models, multi-contact dynamics introduces combinatorial complexity and non-smoothness, complicating contact-rich planning and control. In this paper, we circumvent these challenges by introducing a novel, simplified multi-contact model. Our new model, derived from the duality of optimization-based contact models, dispenses with the complementarity constructs entirely, providing computational advantages such as explicit time stepping, differentiability, automatic satisfaction of Coulomb friction law, and minimal hyperparameter tuning. We demonstrate the effectiveness and efficiency of the model for planning and control in a range of challenging dexterous manipulation tasks, including fingertip 3D in-air manipulation, TriFinger in-hand manipulation, and Allegro hand on-palm reorientation, all with diverse objects. Our method consistently achieves state-of-the-art results: (I) a 96.5% average success rate across tasks, (II) high manipulation accuracy with an average reorientation error of 11{\deg} and position error of 7.8 mm, and (III) model predictive control running at 50-100 Hz for all tested dexterous manipulation tasks. These results are achieved with minimal hyperparameter tuning.