Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Reinforcement Learning algorithms applied to the Cart Pole problem
Paper and Code
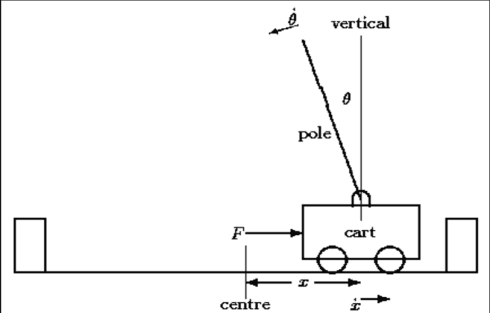
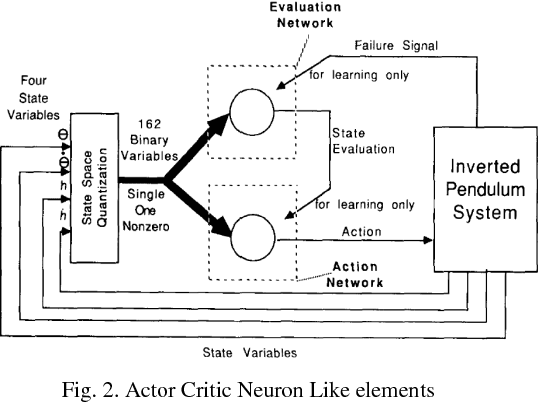

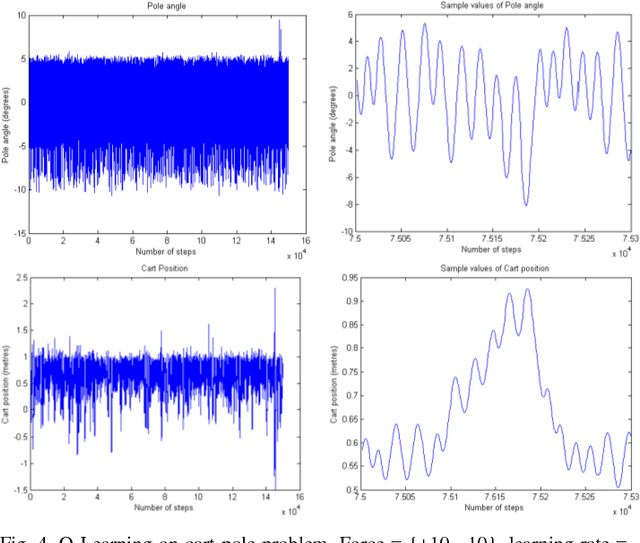
Designing optimal controllers continues to be challenging as systems are becoming complex and are inherently nonlinear. The principal advantage of reinforcement learning (RL) is its ability to learn from the interaction with the environment and provide optimal control strategy. In this paper, RL is explored in the context of control of the benchmark cartpole dynamical system with no prior knowledge of the dynamics. RL algorithms such as temporal-difference, policy gradient actor-critic, and value function approximation are compared in this context with the standard LQR solution. Further, we propose a novel approach to integrate RL and swing-up controllers.
* 2017 International Conference on Advances in Computing,
Communications and Informatics (ICACCI)
View paper on