Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison between safety methods control barrier function vs. reachability analysis
Paper and Code
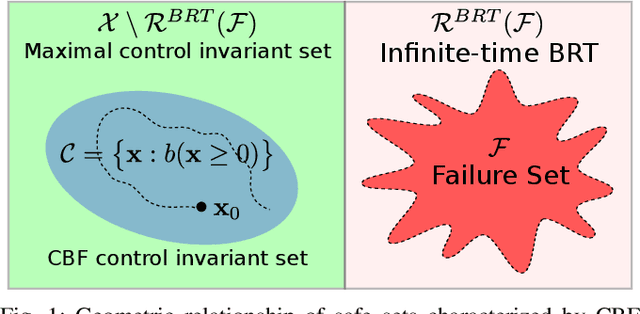
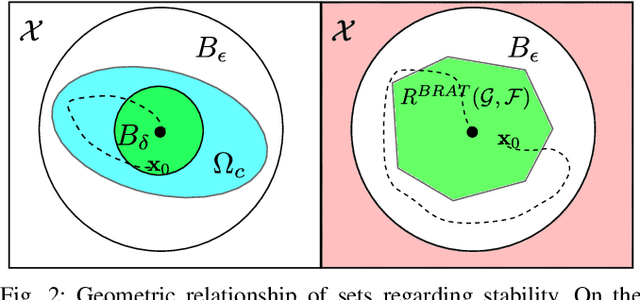
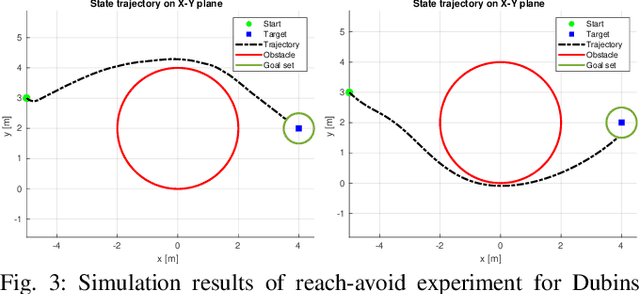
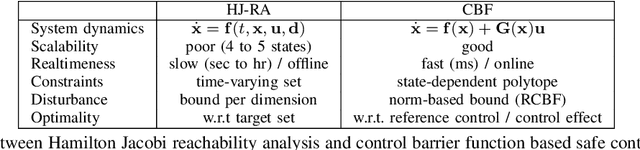
This report aims to compare two safety methods: control barrier function and Hamilton-Jacobi reachability analysis. We will consider the difference with a focus on the following aspects: generality of system dynamics, difficulty of construction and computation cost. A standard Dubins car model will be evaluated numerically to make the comparison more concrete.
View paper on