 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompact pneumatic clutch with integrated stiffness variation and position feedback
Paper and Code
Mar 05, 2021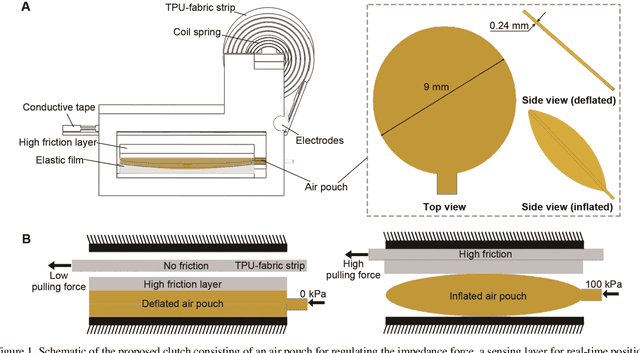
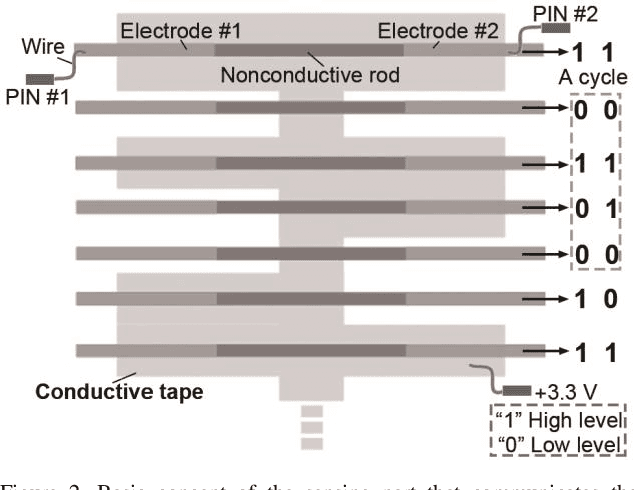
Stiffness variation and real-time position feedback are critical for any robotic system but most importantly for active and wearable devices to interact with the user and environment. Currently, for compact sizes, there is a lack of solutions bringing high-fidelity feedback and maintaining design and functional integrity. In this work, we propose a novel minimal clutch with integrated stiffness variation and real-time position feedback whose performance surpasses conventional jamming solutions. We introduce integrated design, modeling, and verification of the clutch in detail. Preliminary experimental results show the change in impedance force of the clutch is close to 24-fold at the maximum force density of 15.64 N/cm2. We validated the clutch experimentally in (1) enhancing the bending stiffness of a soft actuator to increase a soft manipulator's gripping force by 73%; (2) enabling a soft cylindrical actuator to execute omnidirectional movement; (3) providing real-time position feedback for hand posture detection and impedance force for kinesthetic haptic feedback. This manuscript presents the functional components with a focus on the integrated design methodology, which will have an impact on the development of soft robots and wearable devices.