 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Control Co-design in Wireless Edge Industrial Systems
Paper and Code
Feb 08, 2022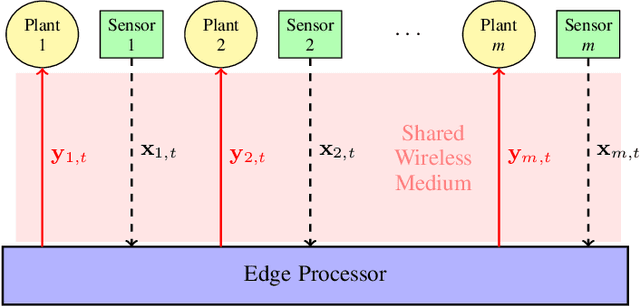
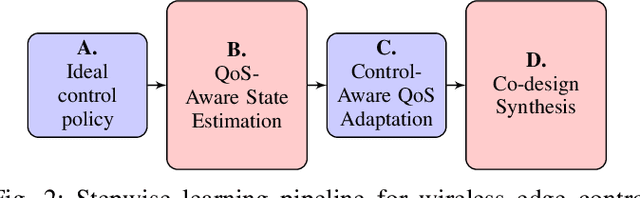
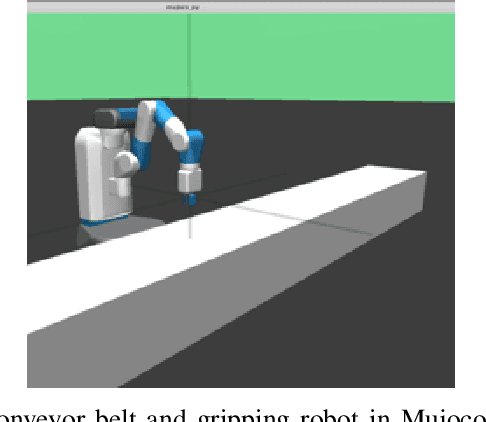
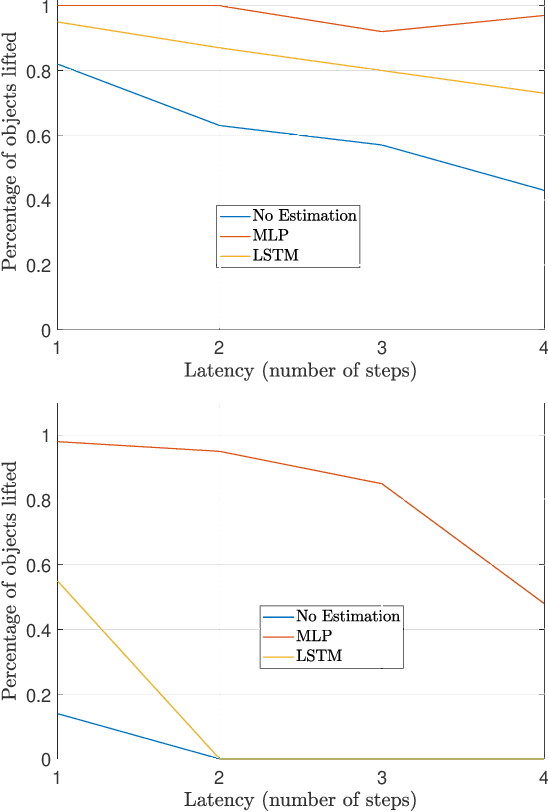
We consider the problem of controlling a series of industrial systems, such as industrial robotics, in a factory environment over a shared wireless channel leveraging edge computing capabilities. The wireless control system model supports the offloading of computational intensive functions, such as perception workloads, to an edge server. However, wireless communications is prone to packet loss and latency and can lead to instability or task failure if the link is not kept sufficiently reliable. Because maintaining high reliability and low latency at all times prohibits scalability due to resource limitations, we propose a communication-control co-design paradigm that varies the network quality of service (QoS) and resulting control actions to the dynamic needs of each plant. We further propose a modular learning framework to solve the complex learning task without knowledge of plant or communication models in a series of learning steps and demonstrate its effectiveness in learning resource-efficient co-design policies in a robotic conveyor belt task.