 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining a Probabilistic Sampling Technique and Simple Heuristics to solve the Dynamic Path Planning Problem
Paper and Code
Dec 01, 2009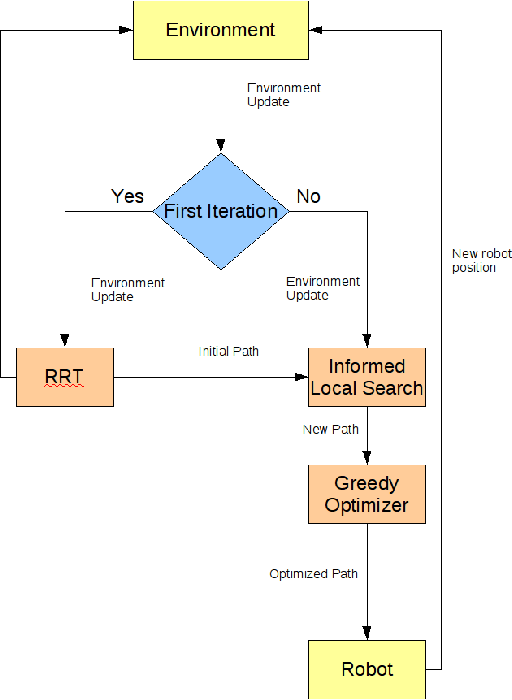
Probabilistic sampling methods have become very popular to solve single-shot path planning problems. Rapidly-exploring Random Trees (RRTs) in particular have been shown to be very efficient in solving high dimensional problems. Even though several RRT variants have been proposed to tackle the dynamic replanning problem, these methods only perform well in environments with infrequent changes. This paper addresses the dynamic path planning problem by combining simple techniques in a multi-stage probabilistic algorithm. This algorithm uses RRTs as an initial solution, informed local search to fix unfeasible paths and a simple greedy optimizer. The algorithm is capable of recognizing when the local search is stuck, and subsequently restart the RRT. We show that this combination of simple techniques provides better responses to a highly dynamic environment than the dynamic RRT variants.