 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLOUD: Contrastive Learning of Unsupervised Dynamics
Paper and Code
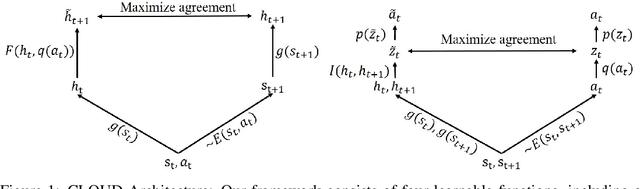



Developing agents that can perform complex control tasks from high dimensional observations such as pixels is challenging due to difficulties in learning dynamics efficiently. In this work, we propose to learn forward and inverse dynamics in a fully unsupervised manner via contrastive estimation. Specifically, we train a forward dynamics model and an inverse dynamics model in the feature space of states and actions with data collected from random exploration. Unlike most existing deterministic models, our energy-based model takes into account the stochastic nature of agent-environment interactions. We demonstrate the efficacy of our approach across a variety of tasks including goal-directed planning and imitation from observations. Project videos and code are at https://jianrenw.github.io/cloud/.