 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosing the Planning-Learning Loop with Application to Autonomous Driving in a Crowd
Paper and Code
Jan 11, 2021
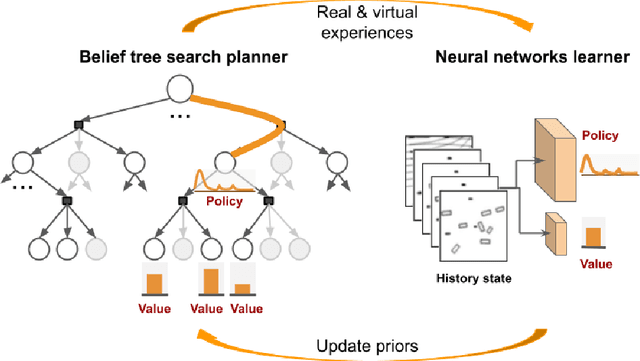
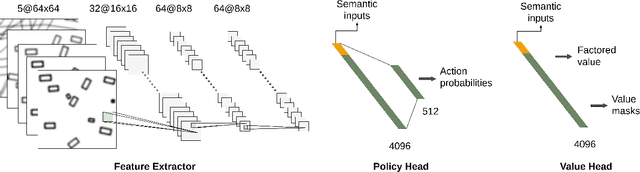

Imagine an autonomous robot vehicle driving in dense, possibly unregulated urban traffic. To contend with an uncertain, interactive environment with many traffic participants, the robot vehicle has to perform long-term planning in order to drive effectively and approach human-level performance. Planning explicitly over a long time horizon, however, incurs prohibitive computational cost and is impractical under real-time constraints. To achieve real-time performance for large-scale planning, this paper introduces Learning from Tree Search for Driving (LeTS-Drive), which integrates planning and learning in a close loop. LeTS-Drive learns a driving policy from a planner based on sparsely-sampled tree search. It then guides online planning using this learned policy for real-time vehicle control. These two steps are repeated to form a close loop so that the planner and the learner inform each other and both improve in synchrony. The entire algorithm evolves on its own in a self-supervised manner, without explicit human efforts on data labeling. We applied LeTS-Drive to autonomous driving in crowded urban environments in simulation. Experimental results clearly show that LeTS-Drive outperforms either planning or learning alone, as well as open-loop integration of planning and learning.