 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Form Second-Order Partial Derivatives of Rigid-Body Inverse Dynamics
Paper and Code
Mar 03, 2022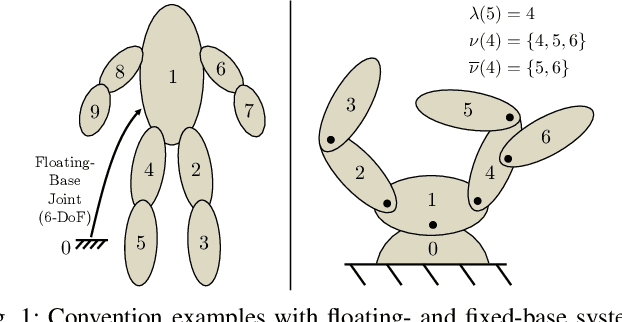
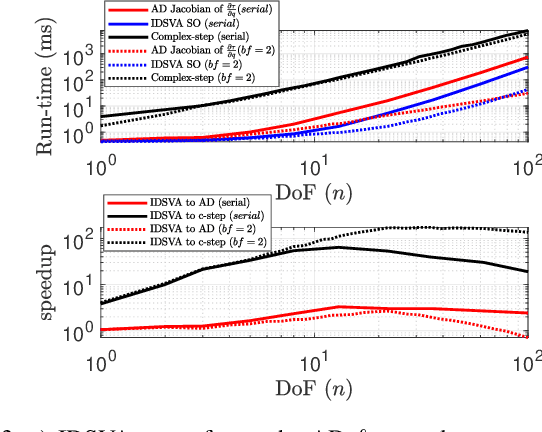
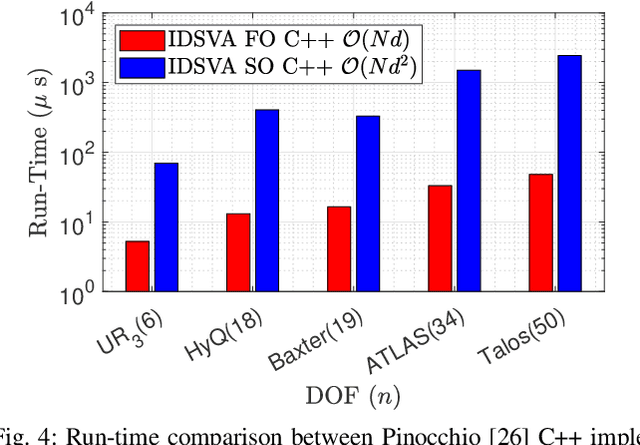
Optimization-based control methods for robots often rely on first-order dynamics approximation methods like in iLQR. Using second-order approximations of the dynamics is expensive due to the costly second-order partial derivatives of dynamics with respect to the state and control. Current approaches for calculating these derivatives typically use automatic differentiation (AD) and chain-rule accumulation or finite-difference. In this paper, for the first time, we present closed-form analytical second-order partial derivatives of inverse dynamics for rigid-body systems with floating base and multi-DoF joints. A new extension of spatial vector algebra is proposed that enables the analysis. A recursive $\mathcal{O}(Nd^2)$ algorithm is also provided where $N$ is the number of bodies and $d$ is the depth of the kinematic tree. A comparison with AD in CasADi shows speedups of 1.5-3$\times$ for serial kinematic trees with $N> 5$, and a C++ implementation shows runtimes of $\approx$400$\mu s$ for a quadruped.