 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization of Real-time Haptic Feedback from Multimodal Neural Network-based Force Estimates during Teleoperation
Paper and Code
Sep 23, 2021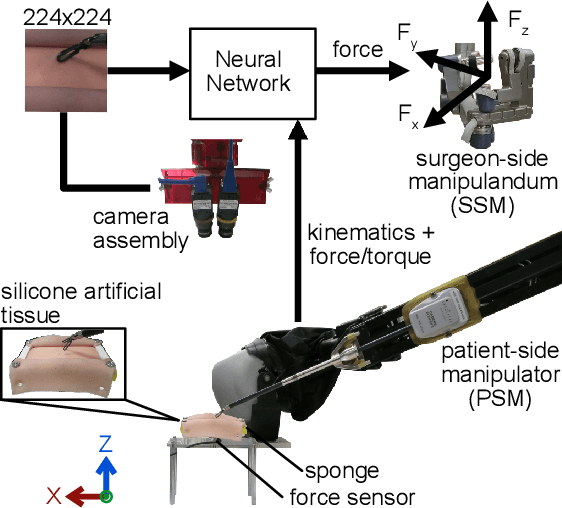
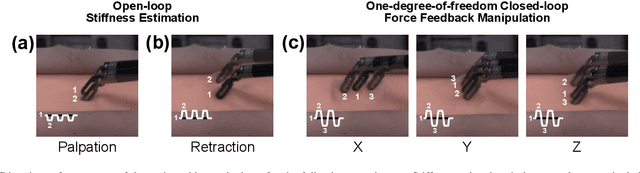

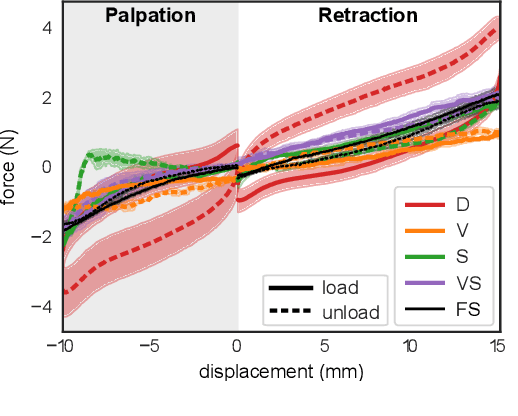
Force estimation using neural networks is a promising approach to enable haptic feedback in minimally invasive surgical robots without end-effector force sensors. Various network architectures have been proposed, but none have been tested in real-time with surgical-like manipulations. Thus, questions remain about the real-time transparency and stability of force feedback from neural network-based force estimates. We characterize the real-time impedance transparency and stability of force feedback rendered on a da Vinci Research Kit teleoperated surgical robot using neural networks with vision-only, state-only, or state and vision inputs. Networks were trained on an existing dataset of teleoperated manipulations without force feedback. We measured real-time transparency without rendered force feedback by commanding the patient-side robot to perform vertical retractions and palpations on artificial silicone tissue. To measure stability and transparency during teleoperation with force feedback to the operator, we modeled a one-degree-of-freedom human and surgeon-side manipulandum that moved the patient-side robot to perform manipulations. We found that the multimodal vision and state network displayed more transparent impedance than single-modality networks under no force feedback. State-based networks displayed instabilities during manipulation with force feedback. This instability was reduced in the multimodal network when refit with additional data collected during teleoperation with force feedback.