 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacter Controllers Using Motion VAEs
Paper and Code
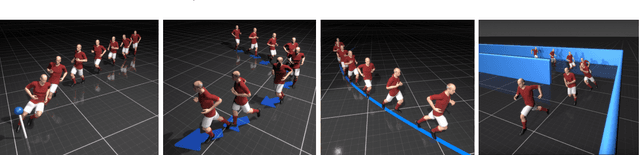
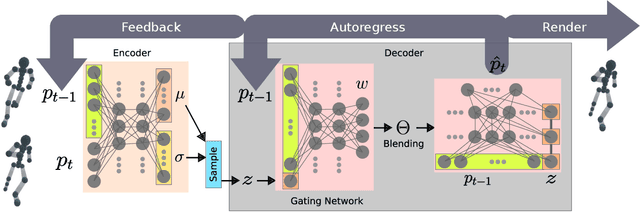
A fundamental problem in computer animation is that of realizing purposeful and realistic human movement given a sufficiently-rich set of motion capture clips. We learn data-driven generative models of human movement using autoregressive conditional variational autoencoders, or Motion VAEs. The latent variables of the learned autoencoder define the action space for the movement and thereby govern its evolution over time. Planning or control algorithms can then use this action space to generate desired motions. In particular, we use deep reinforcement learning to learn controllers that achieve goal-directed movements. We demonstrate the effectiveness of the approach on multiple tasks. We further evaluate system-design choices and describe the current limitations of Motion VAEs.