 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges in Partially-Automated Roadway Feature Mapping Using Mobile Laser Scanning and Vehicle Trajectory Data
Paper and Code
Feb 09, 2019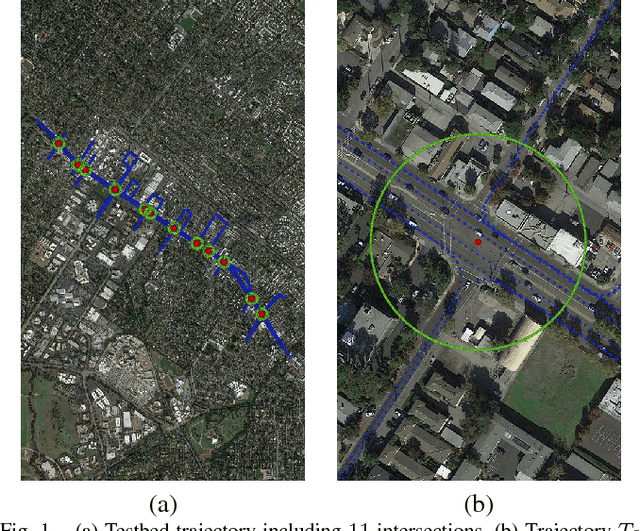
Connected vehicle and driver's assistance applications are greatly facilitated by Enhanced Digital Maps (EDMs) that represent roadway features (e.g., lane edges or centerlines, stop bars). Due to the large number of signalized intersections and miles of roadway, manual development of EDMs on a global basis is not feasible. Mobile Terrestrial Laser Scanning (MTLS) is the preferred data acquisition method to provide data for automated EDM development. Such systems provide an MTLS trajectory and a point cloud for the roadway environment. The challenge is to automatically convert these data into an EDM. This article presents a new processing and feature extraction method, experimental demonstration providing SAE-J2735 map messages for eleven example intersections, and a discussion of the results that points out remaining challenges and suggests directions for future research.