 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCEASE: Collision-Evaluation-based Active Sense System for Collaborative Robotic Arms
Paper and Code
Mar 09, 2024
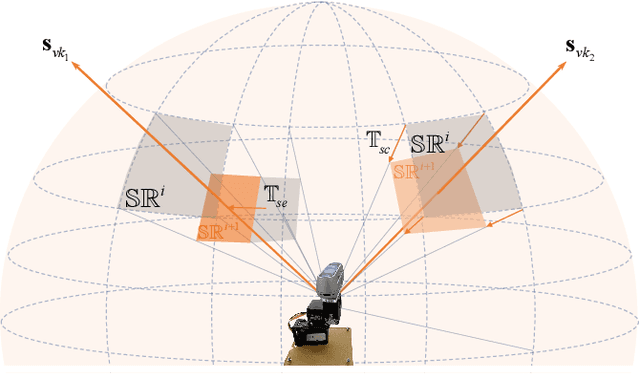


Collision detection via visual fences can significantly enhance the safety of collaborative robotic arms. Existing work typically performs such detection based on pre-deployed stationary cameras outside the robotic arm's workspace. These stationary cameras can only provide a restricted detection range and constrain the mobility of the robotic system. To cope with this issue, we propose an active sense method enabling a wide range of collision risk evaluation in dynamic scenarios. First, an active vision mechanism is implemented by equipping cameras with additional degrees of rotation. Considering the uncertainty in the active sense, we design a state confidence envelope to uniformly characterize both known and potential dynamic obstacles. Subsequently, using the observation-based uncertainty evolution, collision risk is evaluated by the prediction of obstacle envelopes. On this basis, a Markov decision process was employed to search for an optimal observation sequence of the active sense system, which enlarges the field of observation and reduces uncertainties in the state estimation of surrounding obstacles. Simulation and real-world experiments consistently demonstrate a 168% increase in the observation time coverage of typical dynamic humanoid obstacles compared to the method using stationary cameras, which underscores our system's effectiveness in collision risk tracking and enhancing the safety of robotic arms.