 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausality-Based Reinforcement Learning Method for Multi-Stage Robotic Tasks
Paper and Code
Mar 05, 2025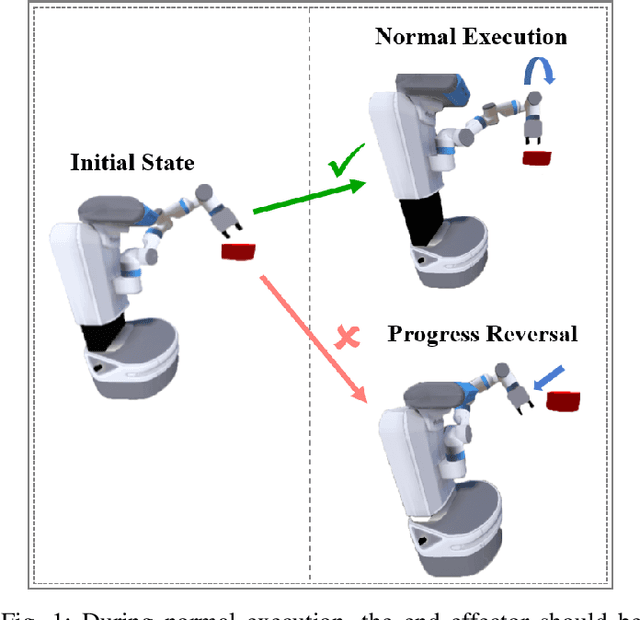
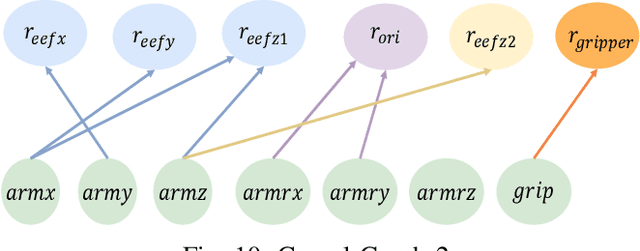
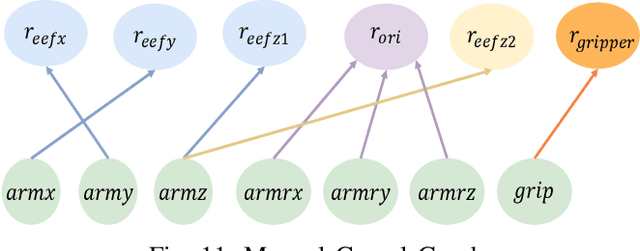
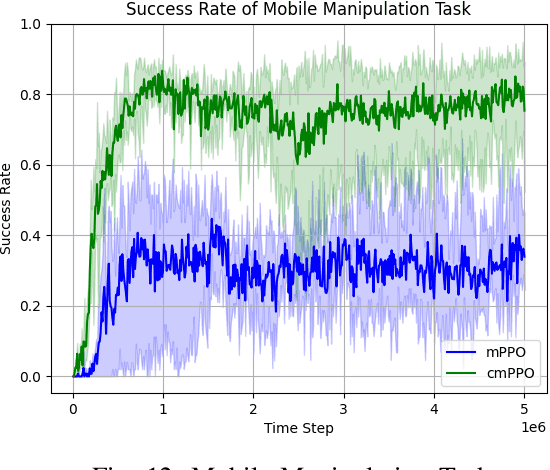
Deep reinforcement learning has made significant strides in various robotic tasks. However, employing deep reinforcement learning methods to tackle multi-stage tasks still a challenge. Reinforcement learning algorithms often encounter issues such as redundant exploration, getting stuck in dead ends, and progress reversal in multi-stage tasks. To address this, we propose a method that integrates causal relationships with reinforcement learning for multi-stage tasks. Our approach enables robots to automatically discover the causal relationships between their actions and the rewards of the tasks and constructs the action space using only causal actions, thereby reducing redundant exploration and progress reversal. By integrating correct causal relationships using the causal policy gradient method into the learning process, our approach can enhance the performance of reinforcement learning algorithms in multi-stage robotic tasks.