 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapability-aware Task Allocation and Team Formation Analysis for Cooperative Exploration of Complex Environments
Paper and Code
Nov 01, 2024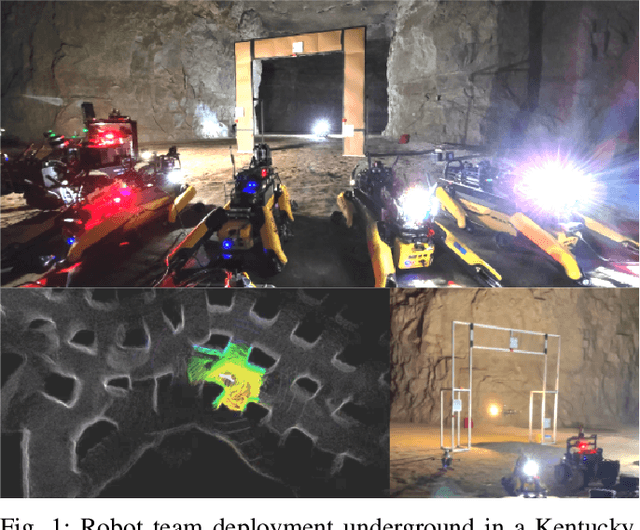
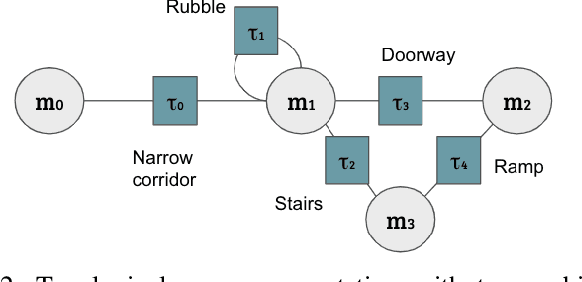
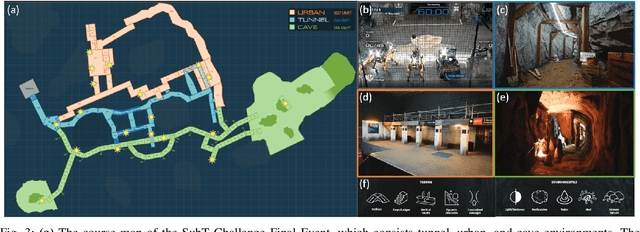
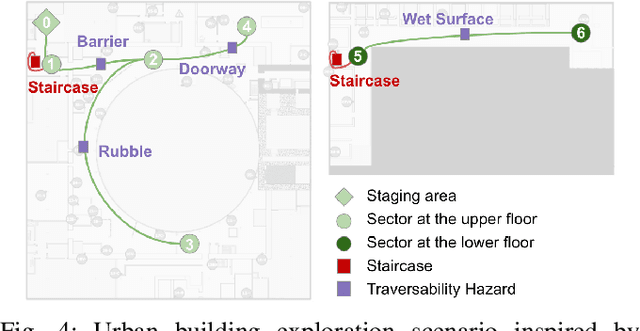
To achieve autonomy in complex real-world exploration missions, we consider deployment strategies for a team of robots with heterogeneous autonomy capabilities. In this work, we formulate a multi-robot exploration mission and compute an operation policy to maintain robot team productivity and maximize mission rewards. The environment description, robot capability, and mission outcome are modeled as a Markov decision process (MDP). We also include constraints in real-world operation, such as sensor failures, limited communication coverage, and mobility-stressing elements. Then, we study the proposed operation model on a real-world scenario in the context of the DARPA Subterranean (SubT) Challenge. The computed deployment policy is also compared against the human-based operation strategy in the final competition of the SubT Challenge. Finally, using the proposed model, we discuss the design trade-off on building a multi-robot team with heterogeneous capabilities.