 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAN-BERT do it? Controller Area Network Intrusion Detection System based on BERT Language Model
Paper and Code
Oct 17, 2022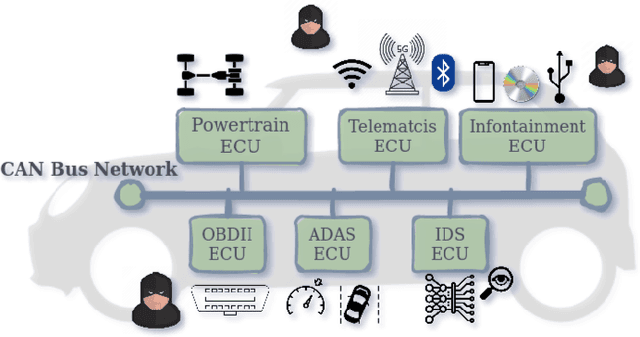

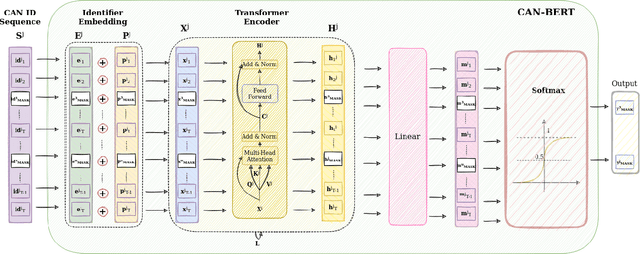
Due to the rising number of sophisticated customer functionalities, electronic control units (ECUs) are increasingly integrated into modern automotive systems. However, the high connectivity between the in-vehicle and the external networks paves the way for hackers who could exploit in-vehicle network protocols' vulnerabilities. Among these protocols, the Controller Area Network (CAN), known as the most widely used in-vehicle networking technology, lacks encryption and authentication mechanisms, making the communications delivered by distributed ECUs insecure. Inspired by the outstanding performance of bidirectional encoder representations from transformers (BERT) for improving many natural language processing tasks, we propose in this paper ``CAN-BERT", a deep learning based network intrusion detection system, to detect cyber attacks on CAN bus protocol. We show that the BERT model can learn the sequence of arbitration identifiers (IDs) in the CAN bus for anomaly detection using the ``masked language model" unsupervised training objective. The experimental results on the ``Car Hacking: Attack \& Defense Challenge 2020" dataset show that ``CAN-BERT" outperforms state-of-the-art approaches. In addition to being able to identify in-vehicle intrusions in real-time within 0.8 ms to 3 ms w.r.t CAN ID sequence length, it can also detect a wide variety of cyberattacks with an F1-score of between 0.81 and 0.99.