 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBRM Localization: UAV Localization in GNSS-Denied Environments Based on Matching of Numerical Map and UAV Images
Paper and Code
Aug 05, 2020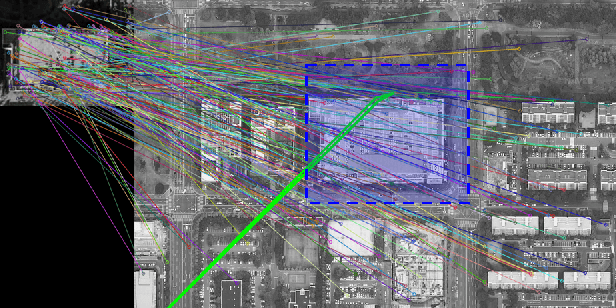
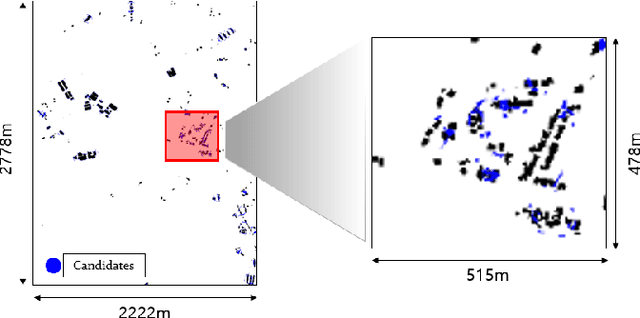
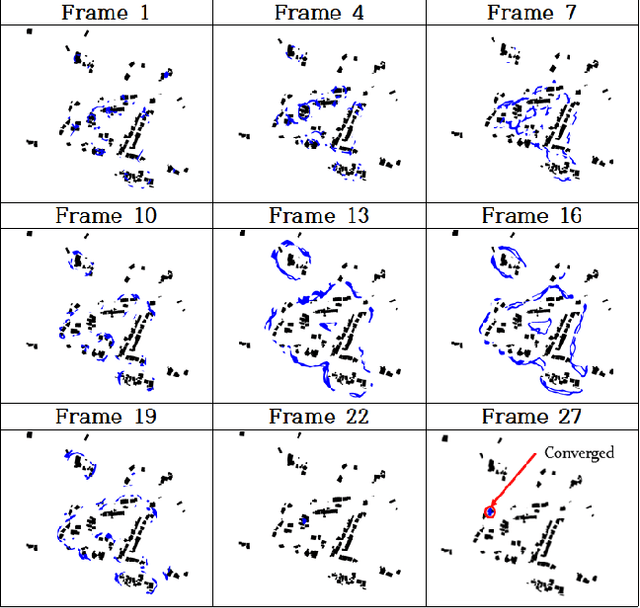

Localization is one of the most important technologies needed to use Unmanned Aerial Vehicles (UAVs) in actual fields. Currently, most UAVs use GNSS to estimate their position. Recently, there have been attacks that target the weaknesses of UAVs that use GNSS, such as interrupting GNSS signal to crash the UAVs or sending fake GNSS signals to hijack the UAVs. To avoid this kind of situation, this paper proposes an algorithm that deals with the localization problem of the UAV in GNSS-denied environments. We propose a localization method, named as BRM (Building Ratio Map based) localization, for a UAV by matching an existing numerical map with UAV images. The building area is extracted from the UAV images. The ratio of buildings that occupy in the corresponding image frame is calculated and matched with the building information on the numerical map. The position estimation is started in the range of several km^2 area, so that the position estimation can be performed without knowing the exact initial coordinate. Only freely available maps are used for training data set and matching the ground truth. Finally, we get real UAV images, IMU data, and GNSS data from UAV flight to show that the proposed method can achieve better performance than the conventional methods.