 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBraking and Body Angles Control of an Insect-Computer Hybrid Robot by Electrical Stimulation of Beetle Flight Muscle in Free Flight
Paper and Code
Nov 29, 2021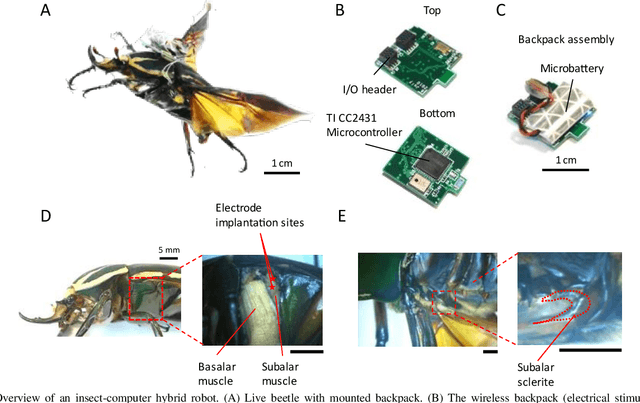
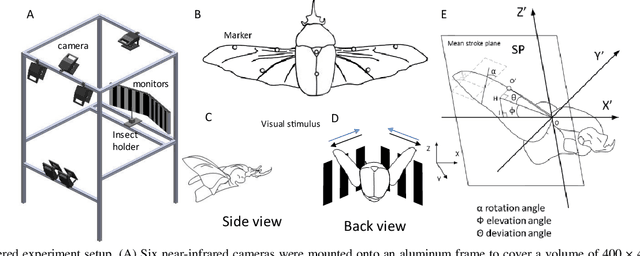
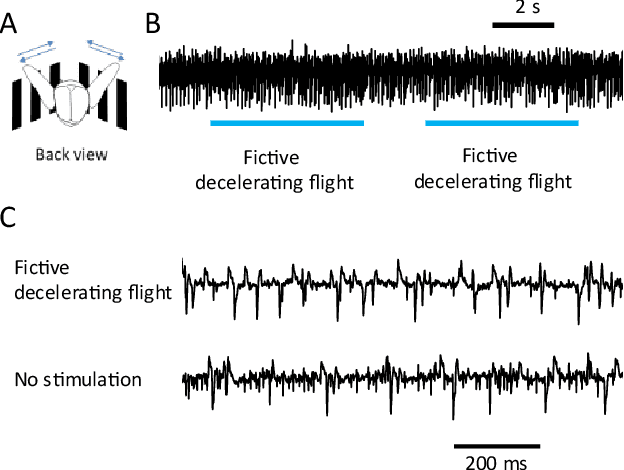
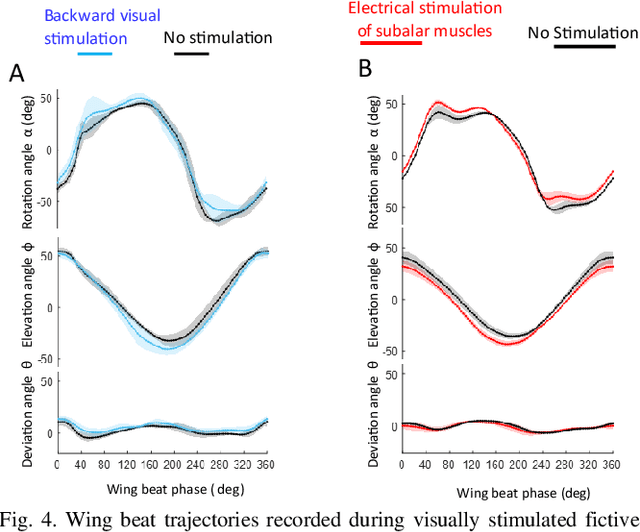
While engineers put lots of effort, resources, and time in building insect scale micro aerial vehicles (MAVs) that fly like insects, insects themselves are the real masters of flight. What if we would use living insect as platform for MAV instead? Here, we reported a flight control via electrical stimulation of a flight muscle of an insect-computer hybrid robot, which is the interface of a mountable wireless backpack controller and a living beetle. The beetle uses indirect flight muscles to drive wing flapping and three major direct flight muscles (basalar, subalar and third axilliary (3Ax) muscles) to control the kinematics of the wings for flight maneuver. While turning control was already achieved by stimulating basalar and 3Ax muscles, electrical stimulation of subalar muscles resulted in braking and elevation control in flight. We also demonstrated around 20 degrees of contralateral yaw and roll by stimulating individual subalar muscle. Stimulating both subalar muscles lead to an increase of 20 degrees in pitch and decelerate the flight by 1.5 m/s2 as well as an induce an elevation of 2 m/s2.