 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations
Paper and Code
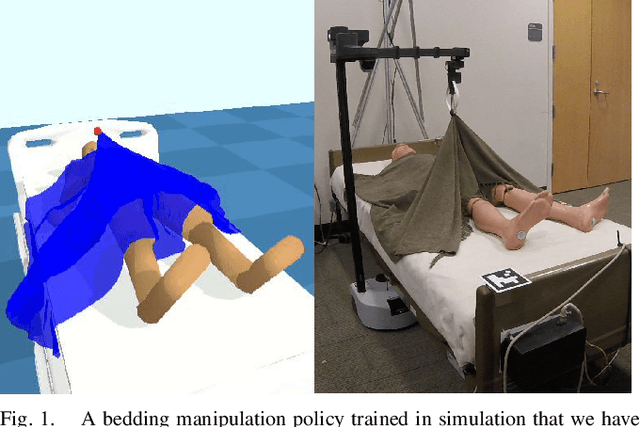

While robots present an opportunity to provide physical assistance to older adults and people with mobility impairments in bed, people frequently rest in bed with blankets that cover the majority of their body. To provide assistance for many daily self-care tasks, such as bathing, dressing, or ambulating, a caregiver must first uncover blankets from part of a person's body. In this work, we introduce a formulation for robotic bedding manipulation around people in which a robot uncovers a blanket from a target body part while ensuring the rest of the human body remains covered. We compare both reinforcement and supervised learning approaches for optimizing policies which provide a robot with grasp and release points that uncover a target part of the body. We trained and conducted evaluations of these policies in physics simulation environments that consist of a deformable cloth mesh covering a simulated human lying supine on a bed. In addition, we transfer simulation-trained policies to a real mobile manipulator and demonstrate that it can uncover a blanket from target body parts of a manikin lying in bed. Source code is available online.