 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlue River Controls: A toolkit for Reinforcement Learning Control Systems on Hardware
Paper and Code
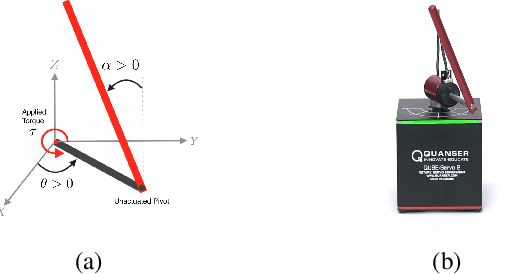
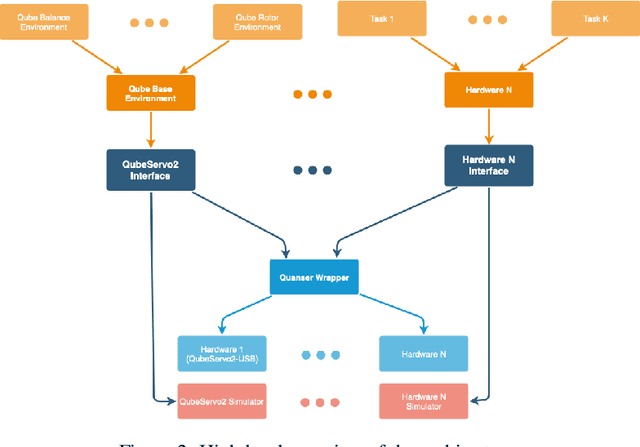
We provide a simple hardware wrapper around the Quanser's hardware-in-the-loop software development kit (HIL SDK) to allow for easy development of new Quanser hardware. To connect to the hardware we use a module written in Cython. The internal QuanserWrapper class handles most of the difficult aspects of interacting with hardware, including the timing (using a hardware timer), and ensuring the data sent to hardware is safe and correct, where safety corresponds to safe operating voltage and current for the specified hardware. Much of the recent success of Reinforcement learning (RL) has been made possible with training and testing tools like OpenAI Gym and Deepmind Control Suite. Unfortunately, tools for quickly testing and transferring high-frequency RL algorithms from simulation to real hardware environment remain mostly absent. We present Blue River Controls, a tool that allows to train and test reinforcement learning algorithms on real-world hardware. It features a simple interface based on OpenAI Gym, that works directly on both simulation and hardware. We use Quanser's Qube Servo2-USB platform, an underactuated rotary pendulum as an initial testing device. We also provide tools to simplify training RL algorithms on other hardware. Several baselines, from both classical controllers and pretrained RL agents are included to compare performance across tasks. Blue River Controls is available at this https URL: https://github.com/BlueRiverTech/quanser-openai-driver